Trojfázový indukční motor - chod při zatížení
Tato lekce se zabývá chodem indukčního motoru při zatížení.
Princip činnosti chodu motoru při zatížení
Připojíme-li statorové vinutí k trojfázové síti a hřídel motoru je mechanicky zatížen pracovním strojem, jemuž odevzdává mechanický výkon formou hnacího momentu, jde o chod při zatížení.
- Rotor se začne zpožďovat za točivým magnetickým polem, aby se v jeho vinutí mohlo indukovat napětí, potřebné k protlačení rotorového proudu I2 vinutí rotoru.
- Čím větším momentem rotor zatěžujeme, tím více se zpožďuje za točivým magnetickým polem.
- Otáčky rotoru klesají a skluz se zvětšuje.
Náhradní schéma
P1 ΔPj1 ΔPj2 P
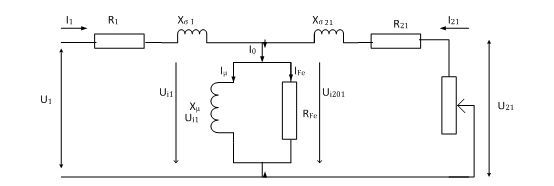
Obr. 1: Náhradní schéma indukčního motoru při zatížení [1]
Výpočet
Rotorový proud I2 a napětí Ui2 indukované v rotoru mají frekvenci, která je dána rozdílem otáček točivého magnetického pole a otáček rotoru. Napětí indukované v rotoru je dáno vztahem

Při normálním provozu motoru je frekvence rotorového proudu velmi malá: při skluzu 6% činí 0,06 ∙ 50 = 3 Hz.
Indukované napětí se bude měnit podle zátěže tak, že čím větší napětí, tím větší skluz. Pro n = 0 a s = 1 je Ui2 = Ui20 (je nejvyšší a působí jako transformátor). Pro s = 0 a ns = n je Ui2 = 0.
U indukčního motoru je třeba respektovat rozptyl magnetického toku. Část magnetického toku Φ1 se uzavírá kolem statorového vinutí a část magnetického toku Φ2 kolem rotorového vinutí. Rozptylové toky se zvětšují s rostoucím zatížením, neboť jsou vybuzeny proudy I1 a I2, které se zatížením také mění. Je tedy skutečný magnetický tok Φ ve vzduchové mezeře při každém zatížení jiný a při každém zatížení se indukuje ve vinutí jiné napětí. Proto se snažíme, aby vzduchová mezera byla co nejmenší a tím i ztráty magnetického toku.
Rozptylová reaktance statorového vinutí je stálá a je dána stálostí síťové frekvence f1:
X1σ = 2π f1 L1.
Rozptylová reaktance rotorového vinutí je proměnlivá, neboť závisí na proměnlivém kmitočtu f2:
X2σs = 2π f2 L2 = 2π s f1 L2 = s X2σ ,
kde X2σ = 2π f1 L2.
Diagram ztrát
V diagramu ztrát značí P1 příkon motoru, P výkon motoru, ∆Pj1 (Jouleovy) ztráty ve statoru (ve vinutí statoru), ∆PFe ztráty v železe, ∆Pj2 (Jouleovy) ztráty v rotoru (ve vinutí rotoru), Pδ výkon přes vzduchovou mezeru a Pmech mechanickou ztrátu.
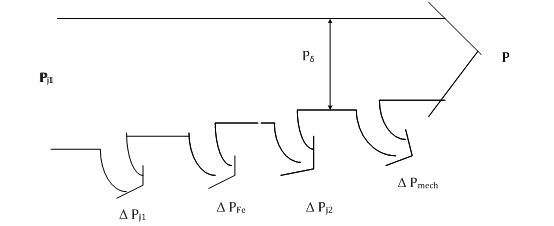
Obr. 2: Diagram ztrát motoru [2]
Fázorový diagram
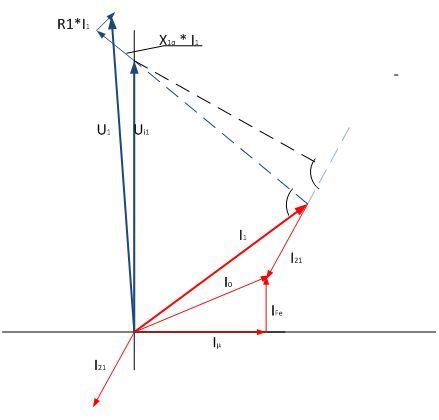
Obr. 3: Fázorový diagram při zatížení [2]