Kvalita regulace a nastavení regulátoru
Kvalitu (jakost) regulace posuzujme podle přesnosti a rychlosti regulace.
Přesnost regulace
Přesnost regulace zjišťujeme v ustáleném stavu po odeznění přechodných dějů. Přesnost stanovujeme v absolutní hodnotě nebo jako relativní hodnotu trvalé odchylky v procentech, vztaženou k žádané hodnotě regulované veličiny.
Příklad:
Požadovaná teplota v peci je 1000°C. Měřením bylo zjištěno, že regulátor udržuje teplotu v rozmezí 990°C až1010°C. Absolutní přesnost je tedy ±10°C, relativní přesnost je ±1%.
Rychlost přechodného děje
Dynamické vlastnosti regulačního obvodu posuzujeme podle přechodové charakteristiky. Skoková vstupní změna může být vyvolána změnou řídící veličiny w nebo působením poruchy d. Podle odezvy na jednotkový skok vstupní veličiny rozlišujeme průběh regulačního pochodu
- ideální (1)
- kmitavý s přeregulováním (2)
- kmitavý bez přeregulování (3)
- nekmitavý (aperiodický) (4)
- s nulovou kvalitou – bez regulace (5)
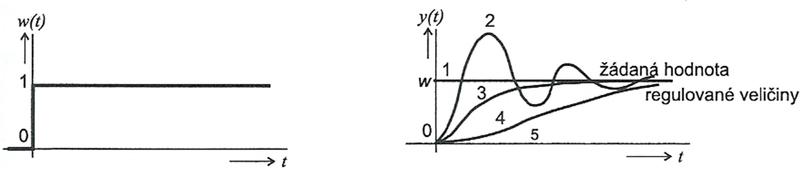
Obr. 1: Odezva na skok řídící veličiny
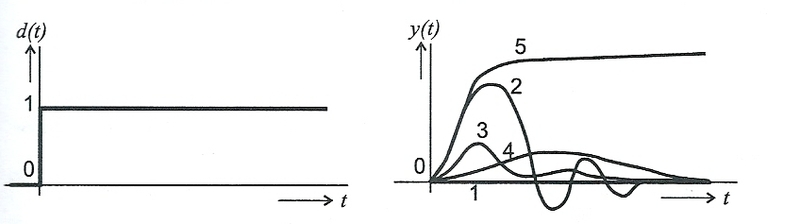
Obr. 2: Odezva na skok poruchové veličiny
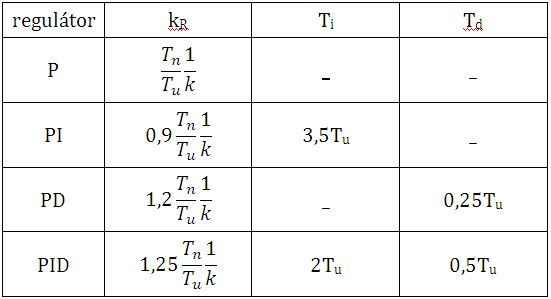
Kmitavé průběhy s přeregulováním, které jsou časté, hodnotíme podle
- maximálního překmitu Δymax v procentech
- doby odezvy tO, která je potřebná k dosažení žádané hodnoty
- doby regulace tR, což je doba potřebná ke zmenšení regulační odchylky na ±5% .
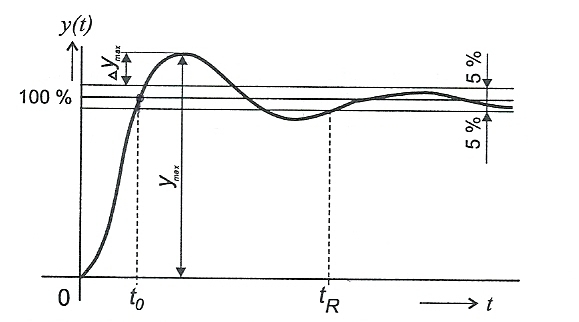
Obr. 3: Přechodová charakteristika regulačního obvodu s kmitavým dějem a ideální přechodová charakteristika
Je třeba vzít v úvahu, že tyto parametry se navzájem ovlivňují, takže pokud zkrátíme dobu regulace dodáním většího množství energie do soustavy, dojde k nárůstu nežádoucího překmitu Δymax. K celkovému posouzení je proto vhodné použít integrální kritéria, která hodnotí kvalitu regulace podle plochy mezi skutečnou a ideální přechodovou charakteristikou, např. kritérium lineární regulační plochy:
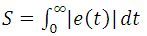
Regulační plocha má být co nejmenší. Tento požadavek vyplývá ze skutečnosti, že při regulačním pochodu dochází k výměně energie. Při záporné regulační odchylce má regulovaná soustava nedostatek energie (plochy označené záporným znaménkem), při kladné regulační odchylce má regulovaná soustava přebytek energie (plochy označené kladným znaménkem) a je potřeby snížit příkon, aby se regulovaná veličina opět přiblížila k žádané hodnotě.
Obr. 4: Určení kvality regulace integrálním kritériem
Dynamické vlastnosti regulované soustavy jsou dány jejími fyzikálními vlastnostmi, takže kvalitu regulace můžeme zlepšit volbou vhodného regulátoru k soustavě a jeho nastavením.
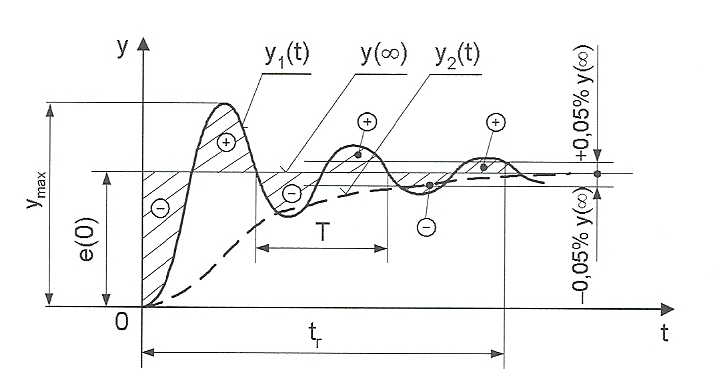
Volba regulátoru k soustavě
Obr. 5: Volba regulátoru
Nastavení regulátoru
Nastavením (seřízením) regulátoru rozumíme určení optimálních hodnot jeho stavitelných parametrů – kR, Ti, Td.
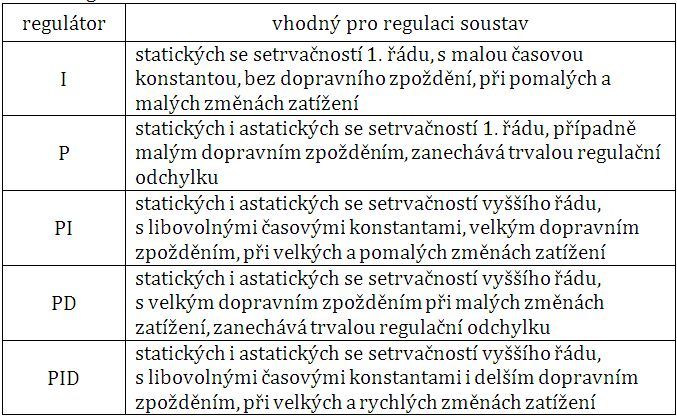
Nastavení regulátoru podle přechodové charakteristiky regulované soustavy :
V odměřené přechodové charakteristice soustavy odečteme po sestrojení tečny v inflexním bodě dobu průtahu Tu a dobu náběhu Tn a zjistíme činitel autoregulace a0 = 1/k. Optimální parametry regulátoru určíme pomocí tabulky.
Obr. 6: Nastavení regulátoru podle přechodové charakteristiky regulované soustavy
Zieglerova-Nicholsova metoda:
Původně experimentální metoda, kdy je seřizovaný regulátor připojen k regulované soustavě. Princip spočívá v přivedení obvodu do kritického stavu na hranici stability, přičemž regulátor pracuje pouze jako proporcionální. Integrační a derivační složka jsou vyřazeny nastavením Ti=∞ a Td=0. Do kritického stavu přivedeme obvod zvyšováním zesílení regulátoru kR, až obvod začne kmitat harmonickými kmity. Toto zesílení označujeme jako kritické zesílení kRk a periodu vzniklých kmitů jako kritickou Tk. Tyto kritické hodnoty dosadíme do empirických vztahů v tabulce a vypočítáme doporučené parametry.
Pokud nastavujeme regulátor I, tak rozkmitání obvodu dosáhneme snižováním Ti na kritickou hodnotu Tik.
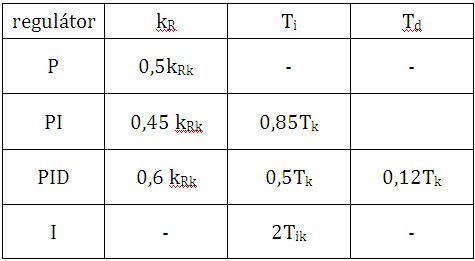
Obr. 7: Nastavení regulátoru podle Zieglera - Nicholse
-
BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1.vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Obrázky
-
Obr. 1, 2 a 3: VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1.vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
-
Obr. 4: BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
Obr. 5, 6 a 7: Archiv autora