Paměťové funkce
Paměťové funkce se používají k uchování stavu, který byl vyvolán krátkým časovým úsekem, např. impulsem z tlačítkového ovládání. Zaznamenání takového stavu může být trvalé nebo jen dočasné.
Mezi základní paměťové funkce patří klopné obvody, které můžeme realizovat kombinačním zapojením jednoduchých logických funkcí AND, OR, NOT s využitím zpětné vazby.
Instrukce mají dva bitové vstupy označované jako S – set a R- reset. Výstup samozřejmě také nabývá pouze logické úrovně jedna nebo nula – datový typ BOOL. Bitový výstup je adresován na paměťové místo M“byte“.“bit“.
Podle toho, zda je dominantní Set nebo Reset, rozlišujeme:
-
klopný obvod RS
-
klopný obvod SR
Instrukce RS klopný obvod
Jedná se o blokovací funkce RS klopného obvodu, ve kterém je dominantní Reset.
Z časového průběhu znázorněného na obrázku níže vidíme, že k vystavení výstupu do logické jedničky dochází při vzestupné hraně na vstupu Set. Výstup se vrací do logické nuly až s náběžnou hranou na vstupu Reset. Jestliže se signály Set a Reset nachází v logické jedničce, bude výstup nabývat logickou nulu (dominuje Reset).
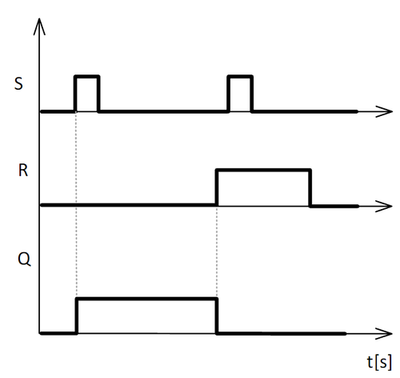
Obr. 1: Časový diagram RS klopného obvodu
Instrukce SR klopný obvod
Jedná se o funkce RS klopného obvodu, ve kterém je dominantní Set.
Z časového diagramu znázorněného níže vidíme opět vystavení logické jedničky na výstupu s náběžnou hranou na vstupu Set. Pokud však mají signály Set a Reset logickou jedničku, bude se i výstup nacházet v logické jedničce (dominuje Set).
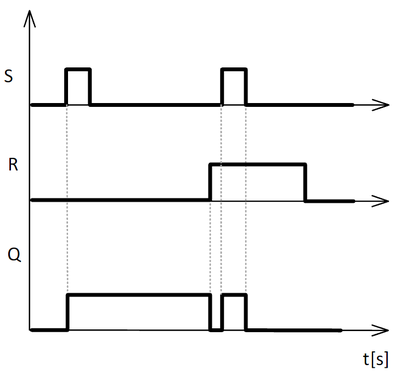
Obr. 2: Časový diagram SR klopného obvodu
Příklad
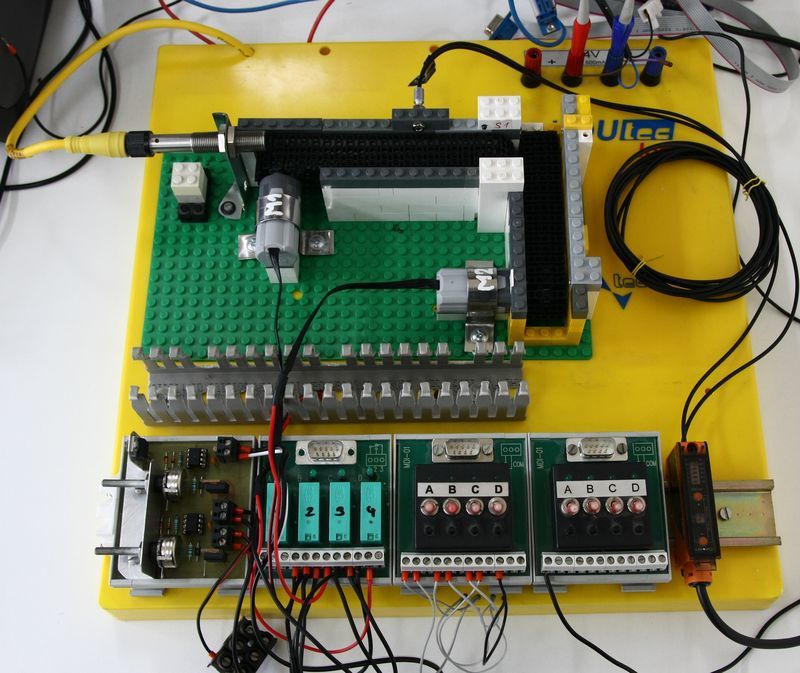
V následujícím příkladu máme rozhodnout o dobrém či vadném výrobku. Může se jednat např. o kontrolu vyrobených drážek, otvorů a jiných prvků na tělese, které bude použitý senzor schopen detekovat. V našem případě je dobrý výrobek charakterizován třemi pulsy z reflexního senzoru, které jsou generovány na základě odrazů od hran drážek.
Tyto pulsy jsou čítány čítačem C255.
Rozhodnutí o dobrém výrobku je podmíněno počtem pulzů ze senzoru, jejichž hodnota je rovna třem. Výsledek je zapsán do paměti M0.1. Na adrese I0.2 dostáváme impuls od senzoru na konci dopravníku, na jehož základě víme, že již obrobek není na páse.
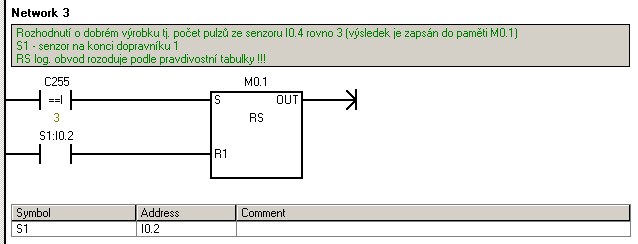
Obr. 3: Rozhodnutí o počtu otvorů pomocí komparátoru "rovná se"
Rozhodnutí o vadném výrobku je podmíněno počtem pulzů ze senzoru v případě, že se nerovná třem. Výsledek je zapsán do paměti M0.2. Na vstup Reset je opět adresován senzor na konci dopravníku.
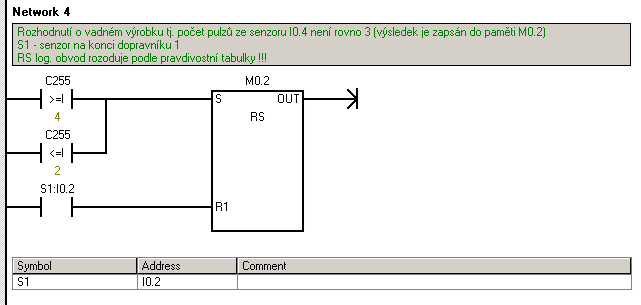
Obr. 4: Rozhodnutí o počtu otvorů pomocí dvou komparátorů "větší/menší nebo rovno"
V okamžiku, kdy obrobek projde koncovou světelnou závorou S1, již podle bitu v paměti M0.1 a M0.2 víme, zda je obrobek dobrý nebo vadný. Podle toho se bude řízení procesu dále odvíjet.
Obrázky
- Pokud není uvedeno jinak, autorem obrázků je Ing. Miroslav Opl
Videa
- Archiv autora