Princip činnosti PLC
V případě programovatelného logického automatu (PLC) se nejedná o zařízení, jaké si dnes pod pojmem automat většina lidí představí. Tedy jako automat na kávu, jízdenky či automat ve smyslu průmyslového zařízení, které automaticky vykonává určité pohyby.
Dnes se jedná o průmyslový počítač s kompaktními rozměry, který je určený pro řízení výrobních linek, strojů a technologií v nejrůznějších průmyslových odvětvích. V současné době také mohou zastávat funkce regulátorů.
Jedná se o nejpoužívanější automatizační prostředek využívaný v průmyslu již zhruba 30 let.
Práce v cyklu
Slovo automat ve svém názvu vystihuje jeho stěžejní vlastnost, tedy schopnost řídit předem stanovené úkoly samočinně – automaticky. Práce PLC je řízena programem, který je vykonáván v cyklech, tvz. skenovacích periodách – hovoříme o cyklickém vykonávání v programové smyčce. Skenovací perioda začíná přečtením vstupů, dále je program zpracován a následně jsou aktualizovány výstupy. Tento cyklus se stále opakuje.
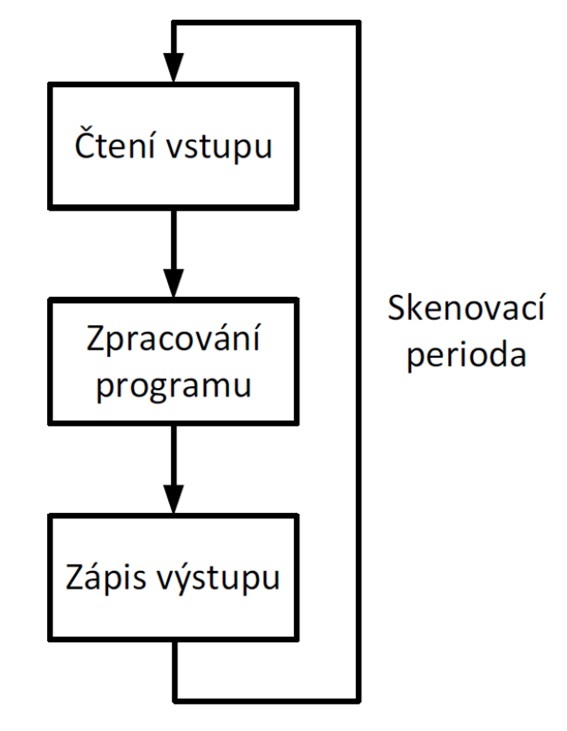
Obr. 1: Cyklická práce PLC
PLC přitom nepracuje s aktuálními hodnotami na vstupně/výstupních portech (I/O). Tyto údaje jsou ukládány do registrů a dále hovoříme o obrazech vstupů a výstupů. Aktualizace těchto hodnot se provede právě jednou za skenovací periodu.
Jak je již tedy zřejmé, PLC stejně jako všechny automaty mají především usnadnit práci člověka. V případě PLC se jedná o snahu nahradit lidský (pomalý, omylný) faktor výkonnějším nástrojem umožňujícím řídit objekty na základě získaných informací.
Způsoby řízení objektů
Řízení může být realizováno jako:
-
ruční
-
přímé
-
zpětnovazební
V případě ručního řízení všechny operace vykonává člověk – tedy sleduje aktuální hodnoty, na jejichž změnu určitým způsobem reaguje.
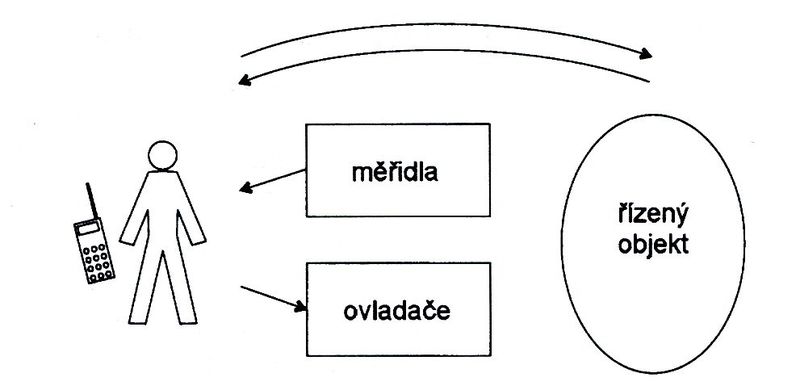
Obr. 2: Ruční řízení
U přímého řízení je člověk do určité míry nahrazen řídicím systémem. Člověk zde pouze zadává parametry, žádané hodnoty a dohlíží na stav systému. Tento způsob řízení však stále nedosahuje samočinné funkce.
Obr. 3: Přímé řízení
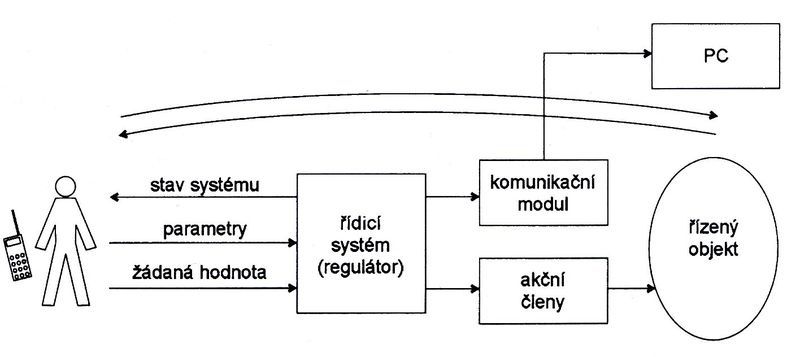
Zpětnovazební řízení již poskytuje řídicímu systému informaci o skutečném stavu řízené soustavy. To je realizováno použitím různých druhů senzorů, zapojených do tzv. zpětné vazby. Na základě výpočtu odchylky skutečné hodnoty a hodnoty žádané provede řídicí systém akční zásah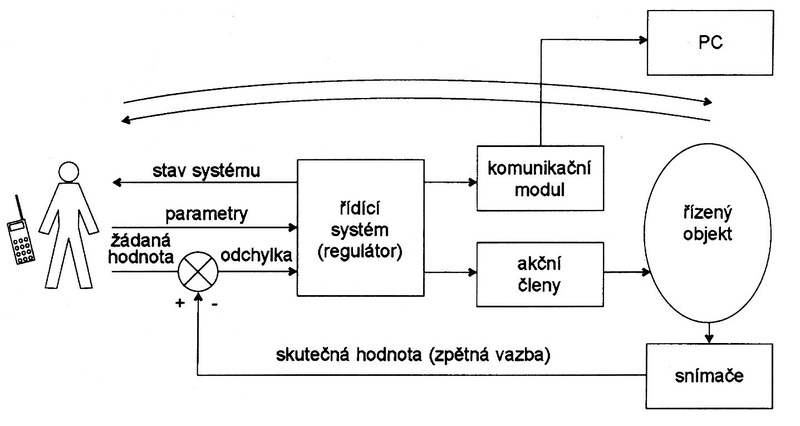
Obr. 4: Zpětnovazební řízení
Jak je z výše uvedených obrázků patrné, řídicí systém, resp. PLC, je pomocí komunikačního modulu připojen k informační vrstvě. Toto hierarchické uspořádání lze znázornit jako pyramidu.
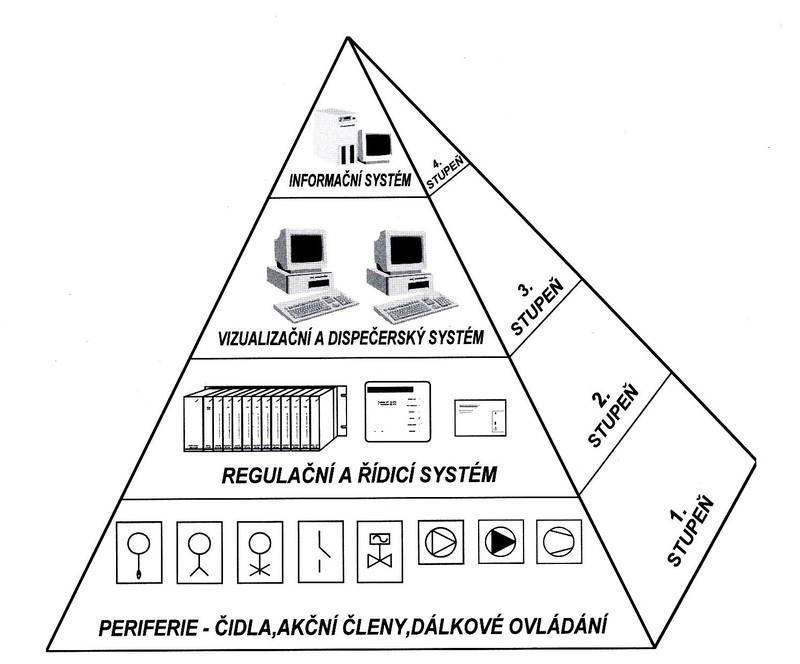
Obr. 5: Čtyřvrstvé uspořádání integrovaného systému výrobního podniku
Obrázky
- Obrázek 1 a 9: Archiv autora
- Obrázek 2, 3, 4 a 5: ŠMEJKAL, Ladislav a Marie MARTINÁSKOVÁ. PLC a automatizace. Praha: BEN - technická literatura, 2009, ISBN 978-80-86056-58-6.
- Obr. 6: Agapios, Elia. Fáze Měsíce [online]. [cit. 2015-1-2]. Dostupný na www: http://astronomia.zcu.cz/obr/astrofoto/galerie/mesic_foto/01_.jpg.
- Obr. 7: Perex,a.s.. Srdeční tep [online]. [cit. 2015-1-2]. Dostupný na www: http://ipravda.sk/res/2013/05/20/thumbs/srdce-tep-pulz-frekvencia-nestandard2.jpg.
- Obr. 8: FDominec. Sinusovka [online]. [cit. 2015-1-2]. Dostupný na www: http://upload.wikimedia.org/wikipedia/commons/thumb/8/8a/Voltage_graph_cs.svg/301px-Voltage_graph_cs.svg.png.
Videa
- Archiv autora


{kind=link}
{kind=link}
{kind=link}