Robot
Je definován jako univerzální stroj s paměťovým zařízením a terminálem, který je schopný náhrady lidské práce pomocí automatického provádění pohybů.
Robot je zařízení, které je schopno vykonávat naprogramované pohyby a úkony, popřípadě automaticky přizpůsobit svoje pohyby a pracovní operace okamžitým okolnostem.
Roboty mohou být:
-
průmyslové
-
vojenské
-
kosmické
-
propagační
-
lékařské
-
pro domácnost
-
zájmové a další.
Průmyslové roboty
Jsou zařízení s vícepolohovými pohybovými jednotkami, vlastním pohonem a řízením pomocí pružného programu. Využívá se pro automatickou operační a mezioperační manipulaci u pracovních strojů nebo při vykonávání technologických úkonů. Jde tedy o víceúčelové zařízení, které může být programováno pro mnoho různých úloh. Proto jsou roboty používány tam, kde je vyžadována pružná automatizace. Výsledné pohyby robotu mohou být výsledkem různého konstrukčního provedení. Na zápěstí robotů se připevňují pracovní hlavice – efektory.
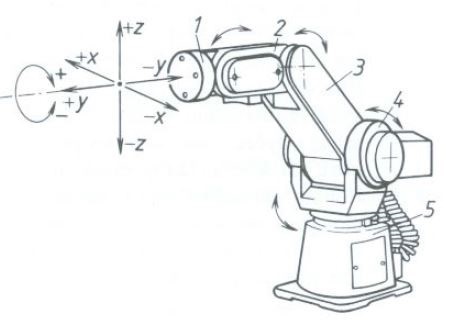
Obr. 1: Univerzální průmyslový robot – schéma s vyznačeným systémem souřadnic os otáčení a posuvů
1 – zápěstí, 2 – předloktí, 3 – paže, 4 – rameno, 5 - podstavec
Efektory mohou být:
-
úchopné (pouze pro uchycení a manipulaci)
-
technologické (pro vykonávání pracovní operace např. svařování, vrtání apod.)
-
kombinované (pro uchycení, manipulaci i vykonání operace nástroje).
Průmyslový robot s adaptivním řízením
Je zařízení nejvyšší skupiny, řízené s různým stupněm inteligence, reagující na změnu pracovních podmínek, pracující s několika podprogramy a autoprogramovatelné.
Kognitivní průmyslový robot s adaptivním řízením je schopný:
-
vnímat a rozeznávat prostředí,
-
vytvářet a průběžně přizpůsobit model prostředí,
-
ovlivňovat prostředí, manipulovat s předměty, případně se v něm pohybovat,
-
komunikovat s člověkem v přirozeném nebo umělém jazyce.
Podle oblasti použití můžeme průmyslové roboty rozdělit:
-
univerzální a manipulační
-
technologické
-
speciální.
Univerzální a manipulační roboty máme:
-
adaptivní roboty (se senzory, samopřizpůsobitelné)
-
pružně programovatelné roboty (řízené programem).
Technologické roboty dělíme na:
-
svářecí roboty
-
roboty pro nanášení barev
-
montážní roboty
-
roboty pro řezací operace
-
měřící roboty
-
roboty pro tlakové lití
-
manipulační roboty s obrobky a nástroji.
Speciální roboty
Zahrnují široký okruh robotických systémů určených pro vykonávání speciálních funkcí (práce pod vodou, v kosmickém prostoru apod.) a pro výzkumné účely (výzkum umělé inteligence, biomechaniky apod.).
Podle konstrukčních parametrů dělíme průmyslové roboty podle:
-
kinematické struktury
-
druhu pohonu
-
řízení pohybu
-
konstrukčního provedení.
Podle kinematické struktury rozlišujeme roboty:
-
s kartézkým
-
cylindrickým
-
sférickým
-
angulárním pracovním prostorem.
Podle druhu pohonu:
-
elektromechanické
-
pneumatické
-
hydraulické
-
kombinované roboty.
Podle řízení pohybu:
-
bodové
-
souvislé
-
bodové a souvislé
-
jiné roboty.
Podle konstrukčního provedení:
-
stojanové
-
konzolové
-
portálové
-
s konstrukcí integrovanou s výrobním zařízením
-
jiné roboty.
Roboty mají velké uplatnění v těch oblastech výroby, kde odstraňují namáhavou, nebezpečnou a především monotónní práci, např. u operací odlévání, kování, tváření plastů a jiných tvářecích operací, při manipulaci s obrobky i nástroji u obráběcích strojů, při přemisťování součástí mezi stroji, nanášení barev a jiných povrchových úpravách, při montáži, dokončovacích operacích, bodovém a obloukovém svařování, při obrábění laserem nebo vodním paprskem, při operacích kontroly a měření. Jednotlivé typy robotů mají speciální charakteristiku – to je velikost manipulačního prostoru, nosnost, rychlost pohybů, přesnost polohování – které určují možnosti jejich využití.
Parametrem ovlivňujícím uplatnění robotů jsou také jejich cena a přesnost.