Motor s cizím buzením
Motor s cizím buzením se konstrukčně ani principiálním zapojením neliší od dynama s cizím buzením. Rozdíl je ve formě vstupní a výstupní energie. Napěťová rovnice motoru má tvar

kde k je konstanta, Φ je hodnota magnetického toku a ωm je úhlová rychlost otáčení motoru.
Spouštění
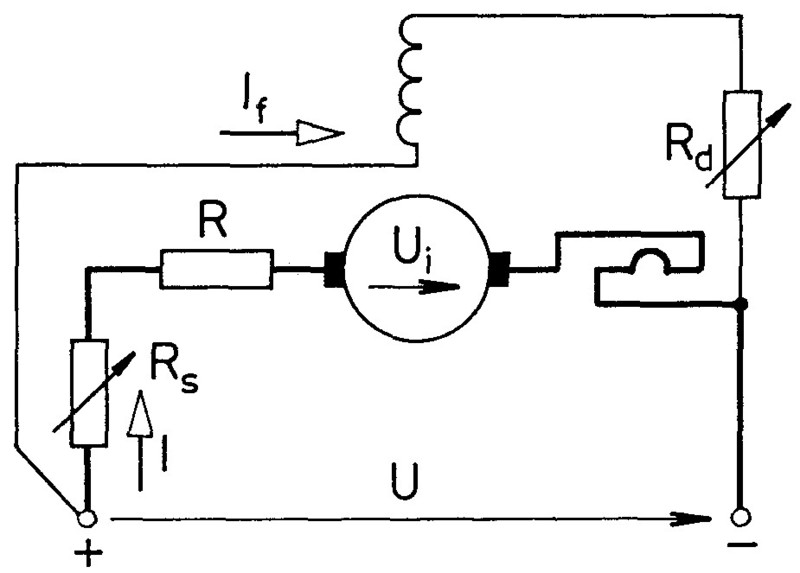
Schéma spouštění motoru s cizím buzením je na obr. 1. Aby měl stejnosměrný motor velký záběrný moment
kde Iz je záběrný proud, i při přípustném menším záběrném proudu kotvy (z důvodu malého jiskření při komutaci), musí být při spouštění plně nabuzen. Poté připojíme kotvu na zdroj, zpravidla přes stupňovitý spouštěcí odpor Rs, protože při stojícím motoru je Ui = 0 a záběrný proud je omezen pouze malým odporem kotvy. [1]
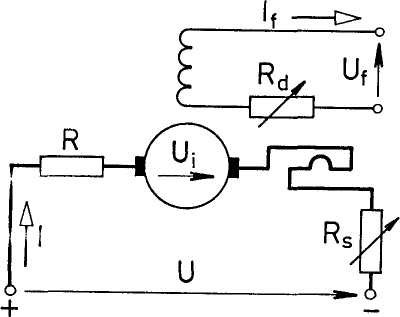
Obr. 1: Schéma spouštění motoru s cizím buzením [4]
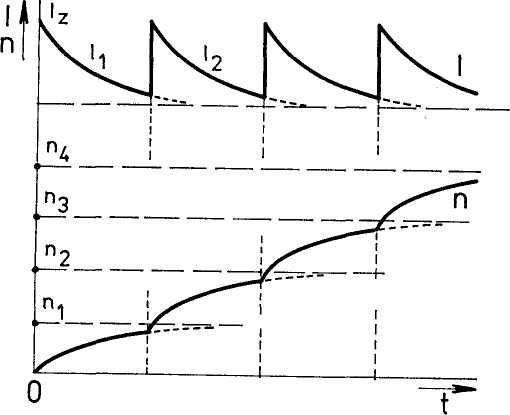
Obr. 2: Průběh proudu a otáček při spouštění motoru s cizím buzením [4]
Záběrný proud při popsaném spouštění je
kde R a Rs odpovídají obr. 1.
Jakmile se motor začne otáčet, indukované napětí nabude nenulové hodnoty a proud kotvy je roven
Se stoupající rychlostí n roste indukované napětí Ui, klesá proud I a moment M. Rychlost a proud se ustálí na hodnotách n1 a I1, viz obr. 2. Vyřadíme-li jeden stupeň spouštěcího odporu při zanedbání indukčností vinutí, skokem stoupne napětí na kotvě U a tím i proud I2. Tím vzroste moment urychlující setrvačné hmoty až na rychlost n2. Proces se opakuje až do vyřazení spouštěcího odporu, kdy je spouštění skončeno. Motor s cizím buzením je možno spouštět bez spouštěcího odporu řízením napětí zdroje U, od nulové hodnoty, například z Leonardova soustrojí nebo z řízeného usměrňovače.
Chod při zatížení
Vlastnosti motoru při zatížení vyjadřují jeho zatěžovací charakteristiky:
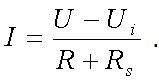
Obr. 3: Rychlostní charakteristika [4]
Rychlostní charakteristika n (I) při U = konst., If = konst.

kde n je počet otáček, kE je konstanta stroje a ϕ je magnetický tok buzení.
Podle této rovnice rychlost n při rostoucím proudu I nepatrně klesá vlivem úbytků napětí R.I na kotvě. Demagnetizační účinek reakce kotvy při kartáčích v neutrální ose způsobí, že pokles otáček je menší, než by odpovídalo přímce, viz obr. 3, křivka 1. Při vyšších proudech může vliv zeslabení pole převažovat nad vlivem úbytků napětí na kotvě, a charakteristika n (I) může dokonce stoupat podle křivky 2 a v některých případech může nepříznivě ovlivnit stabilitu chodu motoru.
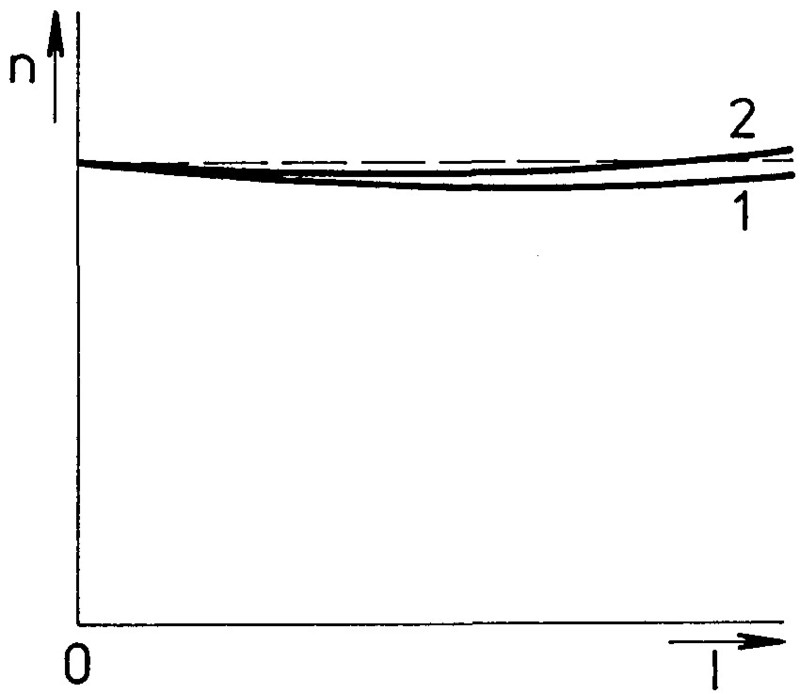
Obr. 4: Momentová charakteristika [4]
Momentová charakteristika M (I) při U = konst., If = konst. je na obr. 4.
Z rovnice plyne, že charakteristika je přímková, pokud se při vyšších hodnotách proudu neprojeví demagnetizující účinek reakce kotvy. K zakřivení dochází zpravidla při proudech větších než proud jmenovitý. Mechanický moment na hřídeli M v témže obrázku je menší o moment ztrát naprázdno M0 než vnitřní elektromagnetický moment Mi.
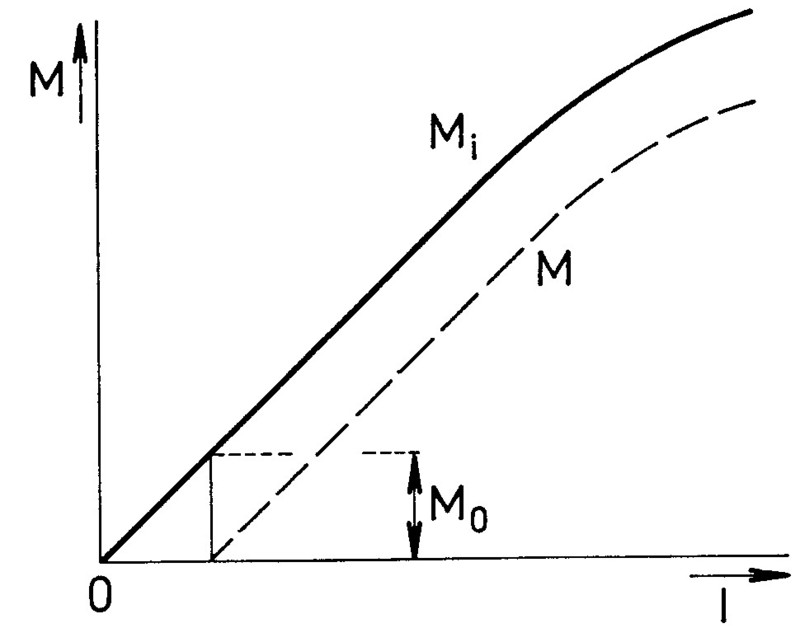
Obr. 5: Mechanická charakteristika [4]
Mechanická charakteristika n (M) při U = konst., If = konst. v obr. 5 je tvarem podobná charakteristice rychlostní n (I), neboť závislost momentu M na proudu I je téměř lineární.
Zhodnocení a užití motorů s cizím buzením
Hlavní výhodou motoru s cizím buzením je snadné, široké a plynulé řízení rychlosti. Z toho vyplývá použití cize buzených stejnosměrných motorů převážně u regulačních pohonů, zejména ve spolupráci v Leonardově skupině nebo s řízeným usměrňovačem. [2]
Motor s paralelním buzením
Obr. 6: Spouštění derivačního motoru [4]
Motor s paralelním buzením (derivační) musí mít při rozběhu budicí obvod připojen přímo na plné napájecí svorkové napětí před spouštěcí odpor a nikoliv na svorky kotvy, jak je naznačeno na obr. 6, aby byla splněna podmínka plného nabuzení při spouštění. Z téhož důvodu není možno derivační motor spouštět změnou napájecího napětí na kotvě. Při sníženém napětí na kotvě by bylo snížené napětí i na svorkách budicího obvodu, a tudíž by nemohla být splněna základní podmínka pro spouštění a stroj by nemohl být při spouštění plně nabuzen.
Rovněž nelze řídit rychlost změnou napětí na svorkách, a tedy není možno jej řídit v Leonardově zapojení. Rychlost lze snadno a plynule řídit změnou budicího proudu nebo odporem v obvodu kotvy. Z toho však vyplývá menší rozsah řízení rychlosti a řízení je navíc ztrátové.
Derivační motor má pro konstantní napájecí napětí stejné charakteristiky jako motor s cizím buzením. Jeho rychlost je velmi málo závislá na zatížení. Je možno jej použít např. u textilních a obráběcích strojů.
Motor se sériovým buzením
Motor se sériovým buzením (sériový) má budicí vinutí zapojeno v sérii s kotvou, a proud kotvy je tedy současně proudem budicím (obr. 7).
Spouštění
Při spouštění motoru se po připojení na svorkové napětí postupně vyřazuje spouštěcí odpor Rs. Tím vzroste proud, spolu s ním magnetický tok, a tedy i moment a motor se urychluje. Indukované napětí Ui se zvětší, proud klesá a moment a rychlost se ustálí na nových hodnotách.
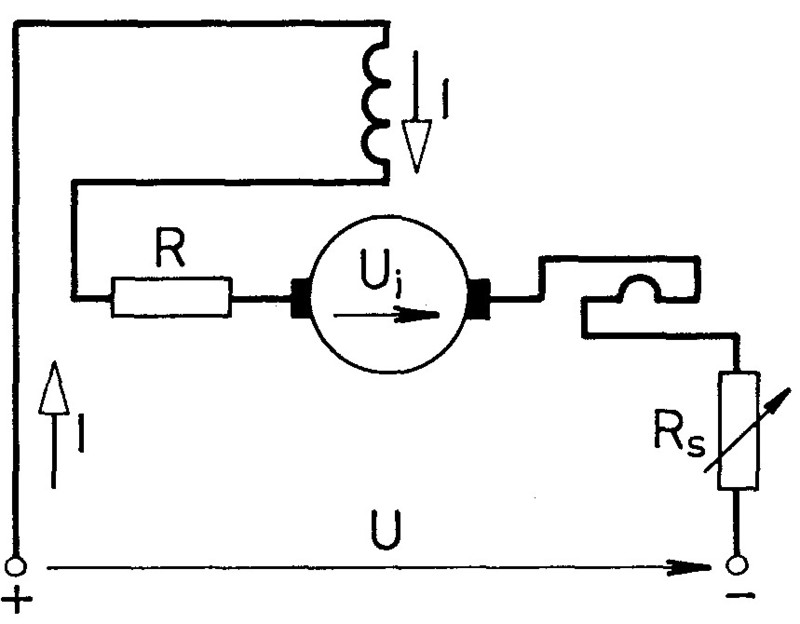
Obr. 7: Spouštění derivačního motoru [4]
Sériový motor nesmí být spouštěn bez zatížení a při provozu se nesmí mechanicky odlehčit, protože při malém mechanickém zatížení odebírá malý proud, tím se odbuzuje a jeho rychlost by mohla nabýt nebezpečných hodnot. Vlastnosti sériového motoru vyjadřují jeho zatěžovací charakteristiky.
Chod při zatížení
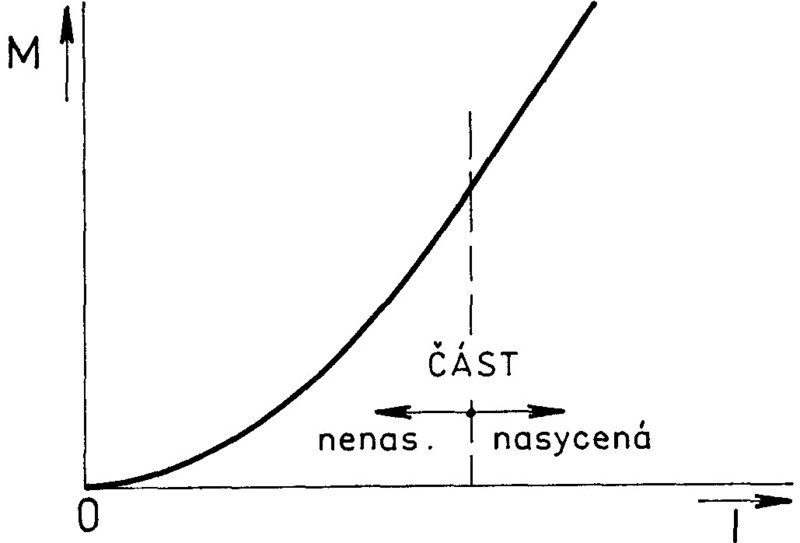
Obr. 8: Momentová charakteristika [4]
Momentová charakteristika Mi (I) při U = konst. plyne pro nenasycený stav magnetického obvodu motoru z rovnice

kde c je konstrukční konstanta stroje.
Grafem této funkce je parabola, která při vyšších proudech, při nasycení magnetického obvodu motoru, přechází v přímku, viz obr. 8, eventuálně se od této přímky může odklánět k menším momentům.
Rychlostní charakteristika n (I)
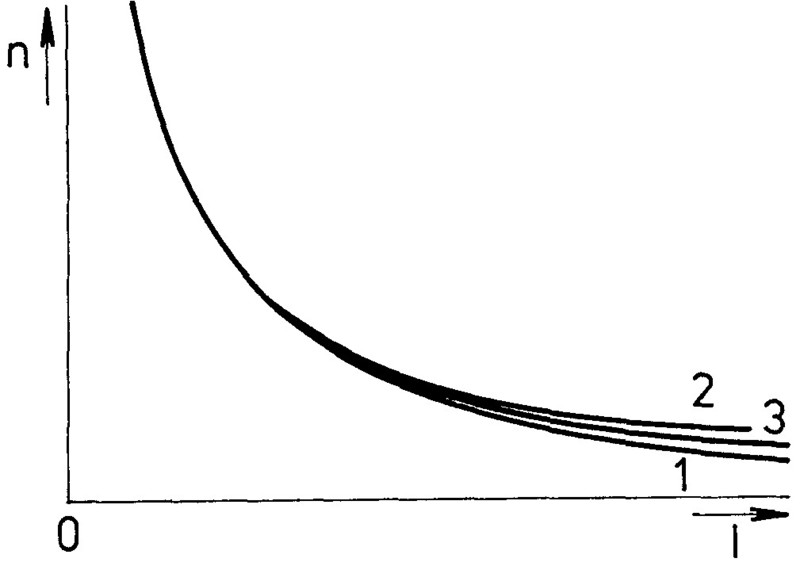
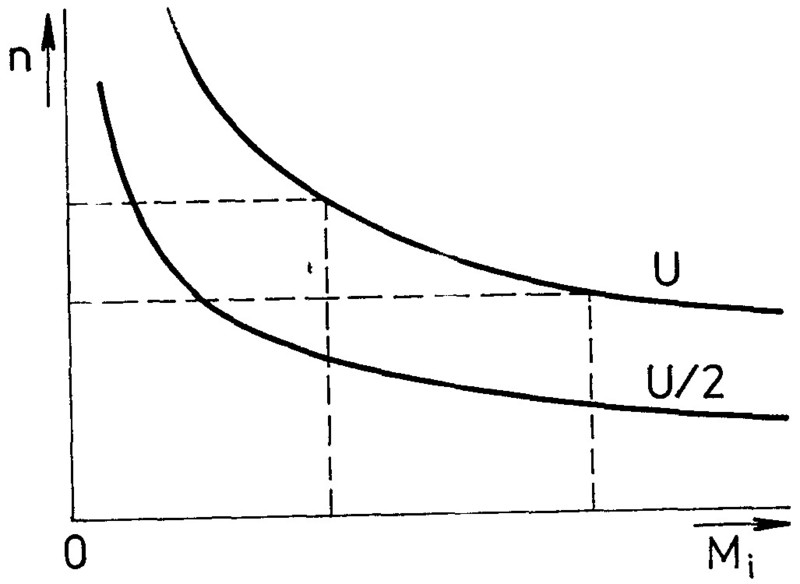
Obr. 9: Rychlostní charakteristika [4]
při U = konst., vyplývá za předpokladu, že magnetický obvod není nasycen, tvar rovnice
kde c je konstrukční konstanta stroje, který definuje rychlostní charakteristiku motoru se sériovým buzením jako rovnoosou hyperbolu, posunutou směrem dolů k nižším rychlostem (obr. 9). Vlivem nasycení magnetického obvodu při velkých proudech magnetický tok neroste úměrně s proudem a pro větší proudy je rychlost motoru poněkud vyšší, než by odpovídalo průběhu podle hyperboly. Naopak vlivem úbytků napětí R.I se rychlost při větších proudech proti hyperbole snižuje (křivka 1).
Mechanická charakteristika n (M)
Obr. 10: Mechanická charakteristika [4]
při U = konst. vyplývá za předpokladu, že magnetický obvod není nasycen, kdy Φ ~ I, a tudíž Mi = c.I2
Mechanická charakteristika motoru se sériovým buzením je při U = konst. polytropa, poněkud připomínající hyperbolu, viz obr. 10.
Zhodnocení a užití
Při velkém zatížení sériového motoru se automaticky snižuje rychlost, a tak se omezuje výkonové přetížení motoru a napájecí sítě. To je výhodné pro trakci. Motor má měkkou, tzv. trakční charakteristiku. Protože s proudem kotvy roste současně budicí proud a magnetický tok, moment se zvětšuje s proudem více než u motoru s cizím buzením. Sériový motor je tedy vhodný pro těžké rozběhy. Používá se pro pohon jeřábů, v těžkých provozech a v elektrické trakci, ovšem i zde je nahrazován levnějšími asynchronními motory se zvláštním napájením.
Motor se smíšeným buzením
Motor se smíšeným buzením (kompaundní) má na hlavních pólech dvě budicí vinutí, paralelní a sériové, která utvářejí vlastnosti motoru tak, že tvoří přechod mezi motorem s paralelním a sériovým buzením. Sériové vinutí je zapojeno tak, aby zesilovalo magnetický tok budicího vinutí zapojeného paralelně ke kotvě. Jeho působením se rychlost se zatížením zmenšuje více než u derivačního motoru. Kompaundní motor má tzv. “měkčí” rychlostní, resp. mechanickou charakteristiku než motor s paralelním buzením. Při odlehčení motoru rychlost vlivem stálého magnetického toku paralelního budicího vinutí neroste na tak vysokou hodnotu jako u motoru se sériovým buzením.
Pro řízení rychlosti platí tytéž zásady jako u ostatních stejnosměrných motorů. Při brzdění kompaundního motoru je též nutno změnit polaritu budicího vinutí, podobně jako u sériového motoru. Brzdit je možno i rekuperací, je však třeba zkratovat sériové budicí vinutí, které by jinak při vyšší rychlosti zeslabovalo výsledné pole stroje. [3]
[1] VRÁNA, Václav, Stanislav KOCMAN a Václav KOLÁŘ: Stejnosměrné stroje [online]. [cit. 2014-10-11]. Dostupný na www: http://fei1.vsb.cz/kat420/vyuka/hgf/elektrotechnika/sylab_stejnosmerne_stroje_bc.pdf
[2] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-11]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/A1B14SP1_Stejnosmerne_stroje.pdf
[3] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-11]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/EMM-p-2-14-44--SS.doc
Obrázky
[4] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-11]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/EMM-p-2-14-44--SS.doc