Řízení otáček
Řízení otáček motoru s cizím buzením
Podle rovnice
je možno otáčky motoru řídit změnou napětí na kotvě U nebo změnou magnetického toku Φ, tj. změnou budicího proudu If, případně odporem R v obvodu kotvy. Při poklesu budicího, a tedy magnetického toku stoupne současně proud podle vztahu
neboť vlivem setrvačných hmot otáčejících se částí pohonu nemůže rychlost vzrůst okamžitě. Protože indukované napětí motoru bývá asi

pak při poklesu toku například na 0,8.Φ je poměr proudu po odbuzení k proudu před odbuzením
Magnetický tok se zmenšil pouze o 20%, proud se však zvýšil téměř 3x. Zvýšil se tudíž i moment a motor se urychlí až do ustálení otáček a proud poklesne.
Optimální řízení otáček je při maximálním momentu. Toho je možno dosáhnout při trvalém maximálním přípustném, tj. jmenovitém proudu kotvy. Řízení otáček při konstantním proudu lze realizovat postupně: nejprve při plném nabuzení proudem If zvyšujeme napětí U na svorkách kotvy. Ze známých vztahů
a

vyplývá, že při If = konst. je při řízení otáček konstantní moment. Výkon Pi a úhlová rychlost ωm rostou lineárně. Při I = konst. se po dosažení jmenovitého napětí UN vnitřní výkon dále nemění. Otáčky lze dále zvyšovat odbuzováním. Moment v závislosti na otáčkách při zanedbání úbytku napětí na kotvě klesá podle rovnoosé hyperboly. Platí:

Řízení rychlosti budicím proudem je řízení při konstantním vnitřním výkonu:
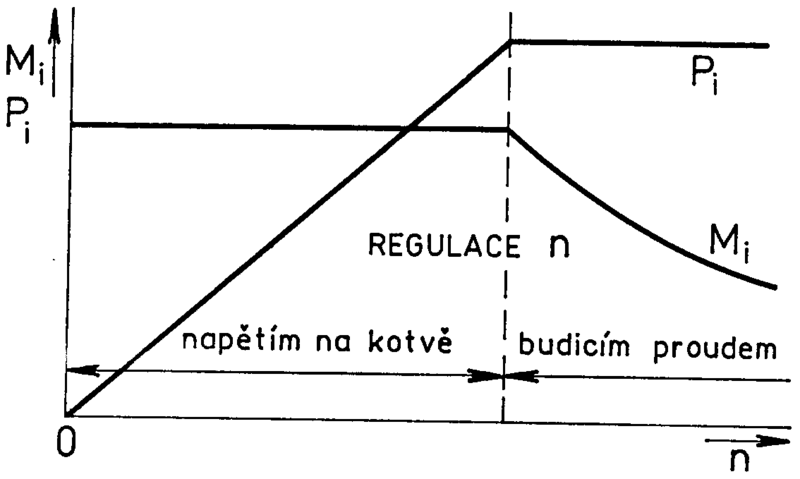
Obr. 1: Řízení otáček motoru s cizím buzením při konstantním proudu [4]
Tento způsob je technicky méně náročný, neboť se řídí v obvodu s menším proudem If. Nevýhodou však je, že stroj není plně magneticky využit a při zvyšování otáček moment klesá. Při řízení napětím na kotvě je stroj sice magneticky využit, avšak vyžaduje zvláštní napájecí zdroj řiditelného napětí. [1]
Leonardovo soustrojí
Leonardovo soustrojí (nesprávně též Ward-Leonardovo) je zdroj řiditelného stejnosměrného napětí a lze jej použít například k řízení otáček stejnosměrného motoru s cizím buzením změnou svorkového napětí na kotvě podle obr. 2. Rozhodujícím článkem Leonardova soustrojí je dynamo s cizím buzením D, s širokým řízením napětí buzením, které napájí kotvu řízeného cize buzeného motoru M. Buzení obou strojů bývá napájeno ze společného budiče B s vlastním (paralelním) buzením. Leonardovo dynamo a budič bývají poháněny obvykle asynchronním motorem AM. Je možno je použít u náročných pohonů, které vyžadují řízení otáček v širokých mezích a reverzaci chodu (např. válcovací stolice, těžní stroje apod.).
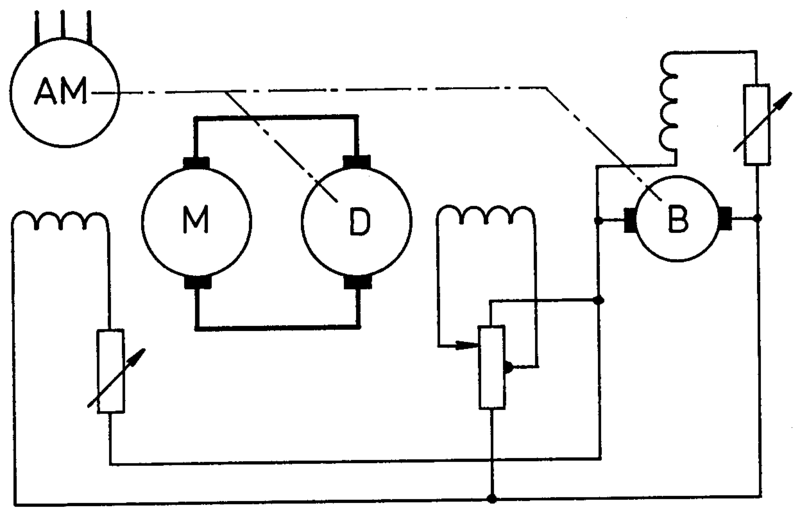
Obr. 2: Schéma Leonardova soustrojí [4]
Výhody Leonardova soustrojí
- Bezeztrátové, široké, plynulé řízení otáček motoru při konstantním momentu řízením poměrně malého výkonu v obvodu budicího vinutí řídicího dynama.
- V obvodu kotev řídicího dynama a motoru nemusí být ani spínací či regulační zařízení, jež by jinak bylo nutno dimenzovat na velký proud a napětí. Charakteristické je přímé propojení svorek Dynamo – Motor.
- Možnost rekuperace energie do sítě při brzdění motoru.
Nevýhodou Leonardova soustrojí jsou vysoké investiční a provozní náklady. Soustrojí s Leonardovým dynamem se nahrazují polovodičovými řízenými usměrňovači, jež umožňují požadovanou plynulou změnu napětí pro řízení otáček motoru.
Brzdění a reverzace
Motor s cizím buzením je možno elektricky brzdit několika způsoby:
Brzdění rekuperací nastává v případě, že indukované napětí stroje je větší než napětí sítě. Proud změní své znaménko podle vztahu
Při stálém buzení se obrátí smysl momentu, stroj pracuje jako dynamo do napájecího zdroje a brzdí se. Zvýšení indukovaného napětí Ui > U je možno dosáhnout třemi způsoby:
- zvýšením otáček stroje nad rychlost naprázdno
- snížením napájecího napětí
- přibuzením, tj. zvýšením budicího proudu motoru.
Brzdění do odporu. Motor se odpojí od napájecího zdroje a na svorky kotvy se připojí odpor. Proud v kotvě a tím i moment změní smysl a stroj pracuje jako dynamo a brzdí se.
Brzdění protiproudem. Kotva se záměnou přívodů připojí na zdroj napájecího napětí. Obrátí se smysl proudu a stroj pracuje jako dynamo a brzdí se. Proud v kotvě bude mnohem větší, neboť je vytvořen nikoli napětím U – Ui, nýbrž napětím –(U + Ui) mnohonásobně vyšším (indukované napětí motoru bývá obvykle Ui ≈ 0,9.U). Do obvodu kotvy je pro omezení proudu nutno zařadit brzdicí odpor. Před úplným zastavením stroje je nutno jej odpojit od napájení, jinak by se roztočil v opačném smyslu. Brzdění protiproudem se používá velmi zřídka.
Reverzace (obrácení smyslu točení) motoru s cizím buzením se provádí záměnou přívodů k budicímu vinutí nebo kotvy. [2]
Řízení otáček sériového motoru
Otáčky sériového motoru se řídí změnou napětí zdroje nebo spouštěcím odporem. Otáčky lze řídit rovněž snižováním budicího proudu pomocí bočníku. K budicímu vinutí se připojí bočník (shunt). Jako bočníku se nepoužívá činného odporu, neboť při náhlém připojení na napětí by nastal velký proudový náraz tím, že by proud protékal převážně bočníkem, a nikoli budicím vinutím, které má poměrně velkou indukčnost. Stroj by se tak nenabudil.
Brzdění a reverzace sériového motoru
Brzdění sériového motoru se realizuje převážně do odporu. Protože se při přechodu z motorového do generátorového režimu mění smysl proudu, je nutno změnit polaritu budicího vinutí, aby v něm zůstal zachován smysl proudu a aby se stroj pracující jako dynamo neodbudil. Protože smysl proudu v kotvě je opačný, obrátí se smysl momentu a stroj je brzděn.
Brzdění sériového motoru rekuperací není možné, neboť při stoupající rychlosti klesá proud, tedy i magnetický tok a tím i indukované napětí stroje, který tudíž nemůže přejít do generátorového chodu. Rekuperační brzdění motoru navrženého pro sériové buzení je možné pouze při přepojení jeho budicího vinutí na cizí zdroj. [3]
[1] VRÁNA, Václav, Stanislav KOCMAN a Václav KOLÁŘ:Stejnosměrné stroje [online]. [cit. 2014-10-20]. Dostupný na www: http://fei1.vsb.cz/kat420/vyuka/hgf/elektrotechnika/sylab_stejnosmerne_stroje_bc.pdf
[2] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-20]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/A1B14SP1_Stejnosmerne_stroje.pdf
[3] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-20]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/EMM-p-2-14-44--SS.doc
Obrázky
[4] Autor neznámý. Stejnosměrné stroje [online]. [cit. 2014-10-20]. Dostupný na www: http://oldmotor.feld.cvut.cz/www/materialy/A1B14SP1/EMM-p-2-14-44--SS.doc