Trojfázový indukční motor – brzdění
Tato lekce se zabývá způsoby zastavení indukčních strojů.
Brzdění indukčních asynchronních motorů
Stejně jako u stejnosměrných cize buzených motorů existují tři základní způsoby brzdění:
- generátorické (rekuperační)
- protiproudé
- stejnosměrné (dynamické)
Generátorické brzdění
Při zvýšení rychlosti nad ω0 se dostává motor do oblasti generátorického, tj. rekuperačního brzdění, kde je skluz s < 0. Jiná možnost, jak dosáhnout tohoto režimu, je snížení rychlosti ω0=60f/pp (pp je počet pólpárů), čehož lze dosáhnout snížením frekvence napájecího napětí f (tohoto způsobu se používá právě u – dnes by se dalo říci již hromadně používaných – měničů kmitočtu), anebo přepnutím vinutí na vyšší počet pólpárů pp (výtahové motory). Pracovní bod se při tom pohybuje z bodu P1 do P2 nebo při brzdném spouštění břemene do P3.
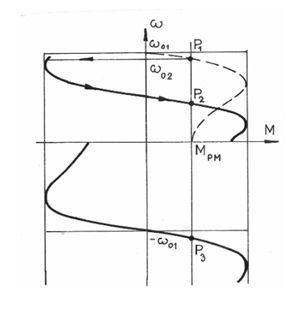
Obr. 1: Momentová charakteristika [1]
Brzdění protiproudem
Obrácením sledu fází napájecího napětí dojde ke změně smyslu točivého pole, takže rotor se otáčí proti smyslu pole (křivka a), skluz s > 1. Indukované napěti s U20 i rotorová frekvence f2 = s · f1 vzrostou v okamžiku přepnutí téměř na dvojnásobek (s = 2). Proto u kroužkového motoru je zapotřebí zařadit do každé fáze rotoru odpor dvojnásobné hodnoty, než je odpor pro spouštění (křivka b). K zabránění rozběhu v protisměru je nutno motor při dosažení nulové rychlosti odpojit od sítě, např. odstředivým vypínačem.
Při brzdném spouštění břemene je pracovní bod P2 ve IV. kvadrantu. U motorů nakrátko je při přepnutí náraz statorového proudu asi o 20% větší než při přímém připojení na síť, navíc všechno teplo se vyvíjí v rotoru. Tyto skutečnosti omezují rozsah výkonů, kde lze použít protisměrného brzdění u motorů nakrátko.
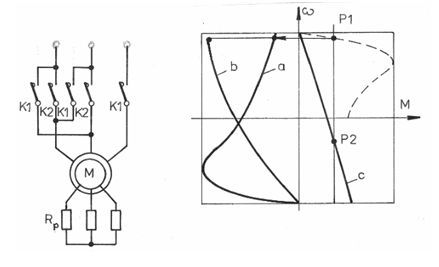
Obr. 2: Schéma zapojení a mechanické charakteristiky protiproudého brzdění [1]
Stejnosměrné brzdění
Při stejnosměrném brzdění se odpojí stator od střídavé sítě a připojí se na zdroj stejnosměrného napětí. Nejčastější zapojení statoru jsou znázorněny na obr. 3, včetně celkového odporu Rc a činitele magnetizačního proudu Kμ. Při dynamickém brzdění se stroj chová jako střídavý generátor. Energie se ztrácí ve formě tepla v rotorových odporech.
Stejnosměrný proud statoru Iss vytvoří stojící magnetické pole, v němž se otáčí kotva motoru. Tvar mechanických charakteristik je na obrázku, kde vystupuje poměrná rychlost v. Na vlastní charakteristice je ν velmi malé, což vede k malému brzdnému momentu při vyšších rychlostech. Proto u větších motorů se zařazuje do rotoru přídavný odpor Rp, který se může postupně vyřazovat – pouze u kroužkových motorů. V kombinaci s řízením budícího proudu Iss lze splnit libovolné požadavky na tvar charakteristik.
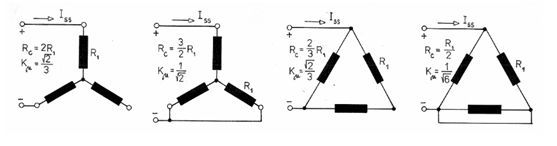
Obr. 3: Zapojení statoru u ss brzdění [1]
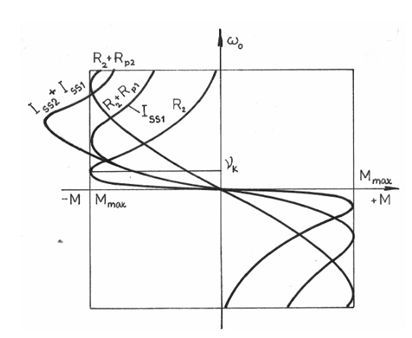
Obr. 4: Mechanické charakteristiky ss brzdění [1]