Trojfázový indukční motor – řízení otáček
Tato lekce se zabývá regulací otáček indukčního motoru.
Řízení otáček asynchronního motoru
Základní rovnice pro synchronní otáčky
ns = 60 ∙ f/p
kde ns jsou synchronní otáčky, f je frekvence přivedeného proudu a p je počet pólových dvojic magnetického pole.
Z rovnice pro skluz

můžeme odvodit vztah pro otáčky rotoru asynchronního motoru:
Otáčky rotoru tedy závisí na:
- frekvenci přivedeného proudu f1 (Hz)
- počtu pólových dvojic magnetického pole p
- skluzu s
Řízení otáček změnou skluzu lze použít pouze u motoru s kroužkovou kotvou. Místo spouštěče se použije reostat, kterým měníme odpor vinutí kotvy a tím se mění také skluz.
Řízení otáček změnou počtu pólů – ve statoru je několik skupin cívek, přepínáním mezi jednotlivými skupinami cívek se mění počet pólových dvojic magnetického pole a mění se otáčky. Tento způsob umožňuje změnu otáček skokem. Používá se jen u motorů s kotvou nakrátko.
Změnu počtu pólů uskutečníme tak, že do drážek statoru vložíme dvě samostatná vinutí, např. čtyřpólové a šestipólové. Podle toho, které vinutí připojíme přepínačem na síť, má magnetické pole statoru synchronní otáčky 1500 za minutu nebo 1000 za minutu. Otáčky rotoru se pak změní v poměru otáček magnetického pole statoru.
Řízení otáček změnou frekvence – v dnešní době se používají polovodičové (tyristorové) měniče frekvence, která se mění od 10 do 100Hz. To umožňuje plynulou změnu otáček. Změna kmitočtu napájecího napětí představuje nejpoužívanější a nejdokonalejší, bezeztrátový způsob řízení. S ohledem na využití motoru je třeba udržovat konstantní hodnotu poměru vazebního magnetického toku (magnetického spřažení) statoru a napájecího kmitočtu, což zhruba odpovídá konstantní hodnotě poměru statorového napětí a jeho kmitočtu. Tento způsob řízení se uplatňuje až do dosažení jmenovitého statorového napětí.
Nejvíce rozšířené je použití nepřímého měniče kmitočtu s napěťovým střídačem s diodovým vstupním usměrňovačem a střídačem s tranzistory IGBT.
Dokonalejší je pulzně-šířkové řízení (PWM), podstatně omezující výskyt harmonických vyšších řádů a vylučující vliv setrvačnosti napěťového meziobvodu. Nejčastěji pomocí frekvenčních měničů, někdy se zřizuje i zvláštní síť s upraveným kmitočtem.
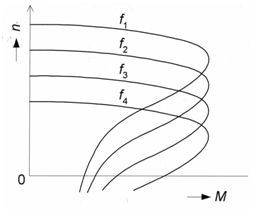
Obr. 1: Řízení změnou frekvence [1]
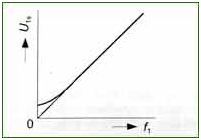
Obr. 2: Závislost U na f [1]
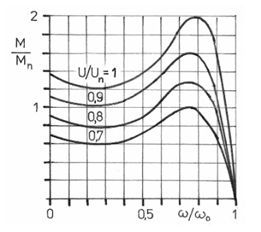
Obr. 3: Závislost M na f [1]
Moment asynchronního motoru je úměrný čtverci napětí, takže asynchronní motor je citlivý na kolísání síťového napětí. Čím vyšší frekvence, tím vyšší otáčky.
Obrázky
[1] Autor neznámý. homen.vsb.cz [online]. [cit. 2014-8-13]. Dostupný na www: http://homen.vsb.cz/~hav278/Mechatronicke_systemy/Studijni_opory/Motory_AM.pdf
Jaké druhy regulace otáček znáš?
Popiš regulaci pomocí skluzu.
Popiš regulaci pomocí změny frekvence.
Popiš regulaci otáček pomocí změny počtu pólů.