Logické řízení
Automatizace představuje přirozený důsledek snahy člověka oprostit se od namáhavé fyzické činnosti, ale též od jednotvárné činnosti duševní. Lidská řídicí činnost při výrobě i mimo výrobní proces je nahrazována činností různých přístrojů a zařízení – práci přebírají automaty, počítače a prvky umělé inteligence.
V průběhu historie došlo nejprve k mechanizaci, tedy k nahrazení opakující se manuální činnosti – například přechodem od ručního na strojní obrábění. S dalším rozvojem techniky a tím i nárůstem nároků na řídicí činnost následovala vlastní automatizace – například přechodem od strojního obrábění s lidskou obsluhou na číslicově řízené obráběcí stroje. Postupně tak byly vytvářeny řídicí systémy – buď plně automatické, tedy bez jakékoli účasti člověka na řízení, nebo více či méně automatizované, kdy člověk například modifikuje způsob řízení podle okamžitého průběhu jinak automaticky řízeného procesu.
Z výše uvedeného tedy vyplývá, že neoddělitelným základem automatizace je řízení. Řízení je proces, ve kterém je řízený systém cíleně ovlivňován řídicími signály tak, aby se dosáhlo předepsaného cíle.
Podle toho, zda je či není výsledek řídícího procesu zpětně kontrolován – tedy podle existence či absence zpětné vazby – odlišujeme ovládání a regulaci.
Ovládání představuje řízení bez zpětné vazby: řídící signály působí na stroj nebo zařízení, aniž by byly průběžně korigovány podle stavu řízeného procesu.
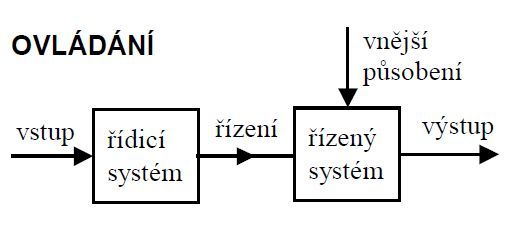
Obr. 1: Ovládání – řízení bez zpětné vazby
Regulace je řízení se zpětnou vazbou, která slouží k tomu, aby byla určitá veličina řízeného systému udržována na požadované hodnotě nebo v požadovaných mezích. To znamená, že dochází ke stabilizaci této veličiny – její hodnoty jsou neustále sledovány a podle zjištěných odchylek od hodnoty požadované je zasahováno do regulačního procesu tak, aby se odchylky odstranily.
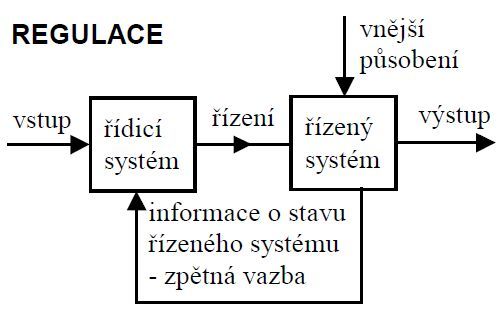
Obr. 2: Regulace – řízení se zpětnou vazbou
Z hlediska principu působení řídicího systému na systém řízený lze dále rozlišovat logické, analogové, diskrétní a fuzzy řízení.
Logické řízení se uskutečňuje pomocí dvouhodnotových neboli binárních signálů, které jsou časovým sledem dvou různých hodnot nebo stavů, např. zapnutý/vypnutý či vodivý/nevodivý. Symbolicky se dvouhodnotové veličiny vyjadřují hodnotami 1 a 0, a jsou tedy analogické s proměnnými výrokové logiky – proto jsou vztahy mezi proměnnými nazývány logické funkce a řídicí obvody pracující na tomto principu se označují jako logické řídicí obvody. Většina řídicích systémů pracuje se spínanými signály a jsou to tedy logické řídicí systémy.
Při analogovém řízení jsou používány spojitě působící signály, které jsou svým časovým průběhem analogovým obrazem, resp. vzorem řízené veličiny. Spojitý řídicí systém vytváří, na rozdíl od diskrétního, nepřetržitou vazbu mezi vstupy a výstupy.
Diskrétní řídicí systém vytváří vztah mezi vstupy a výstupy jako vztah mezi posloupnostmi impulsů, snímaných v časovém sledu s tzv. vzorkovací periodou. Mezi okamžiky vzorkování není regulovaná veličina měřena a ani akční veličina není upravována. Logické i diskrétní řízení lze realizovat na jediném programovatelném automatu, diskrétní řízení s velmi krátkou vzorkovací periodou se zase přibližuje řízení analogovému.
Fuzzy řízení nachází uplatnění u systémů, jejichž chování nelze popsat nebo jejichž matematický či fyzikální model je natolik složitý, že se ztrácí náhled potřebný pro návrh správného řídícího algoritmu. Fuzzy regulátor nejprve přiřadí zvoleným vstupním veličinám jazykovou hodnotu, následně na základě expertních znalostí určí slovní hodnoty akčních veličin a nakonec převede slovní vyjádření na číselné hodnoty veličin.
- VLČEK, Jiří. Řízení, regulace, automatizace [on line]. [cit. 2014-8-23]. Dostupný na www: www.tzb-info.cz/download.py?file=docu/texty/0001/000102_at1.pdf
Obrázky
- Obr. 1, 2: ŠVARC, Ivan. Základy automatizace – Učební texty pro kombinovanou formu bakalářského studia [on line]. [cit. 2014-8-23]. Dostupný na www: http://autnt.fme.vutbr.cz/svarc/ZakladyAutomatizace.pdf
- Obr. 3: Autor neznámý. Leonardo da Vinci's long-lost mechanical lion recreated in France [on line]. [cit. 2014-10-23]. Dostupný na www: http://article.wn.com/view/2009/08/15/Leonardo_da_Vincis_longlost_mechanical_lion_recreated_in_Fra
