Příklady ovládacích obvodů
V následující kapitole uvedeme několik typických příkladů kontaktních a bezkontaktních realizací ovládacích obvodů.
Kontaktní logické řízení
Schémata kontaktního řízení lze znázorňovat v blokovém uspořádání, kdy bloky reprezentují jednotlivé přístroje (potom například kontakty stykače jsou kresleny v jednom bloku) nebo, u složitějších řídicích obvodů, v rozloženém uspořádání, kdy každému spotřebiči odpovídá jedna proudová větev (kdy jsou jednotlivé kontakty stykačů zakresleny do větví, kde spínají proud). To znamená, že v řádkových (liniových) schématech kontaktních realizací složitějších zapojení bývá – pro zvýšení přehlednosti – oddělena silová a logická část obvodů.
Schéma kontaktního řízení zapínání motoru
Spínačem S1 je prostřednictvím relé K1 zapnut stykač K10 a ten připojí motor M1 k fázovým vodičům L1, L2, L3. Signální žárovka H1 svítí při rozpojeném kontaktu S1 (kdy je motor v klidu) a zhasne při sepnutí kontaktu S1 (kdy je motor připojen). Odpojení žárovky je způsobeno rozpínacím kontaktem relé K1.
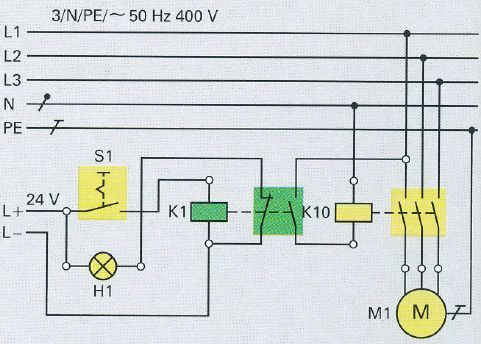
Obr. 1: Blokově uspořádané schéma
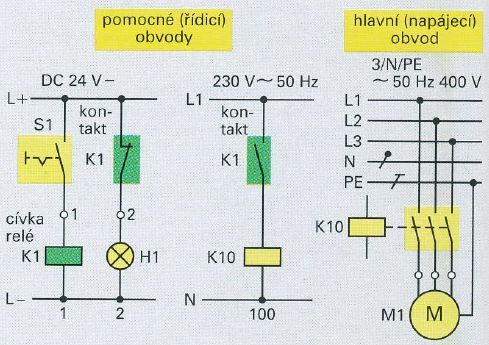
Obr. 2: Rozloženě uspořádané schéma
Základní obvody kontaktního řízení
-
Přenos. Prostřednictvím relé a stykačů lze přenášet spínací logické signály z jednoho proudového obvodu do druhého, aniž by tyto byly galvanicky propojeny. Příkladem je oddělení ručního spínače S1 od stykače K10 přes kontakt relé K1 (viz předchozí schéma).
-
Zesilování a zmnožování. Pomocí relé i stykače lze zesílit spínací výkon. Relé vyžaduje sepnutí malou energií, jeho kontakty ale ovládají výkon mnohem vyšší, například napájení cívky stykače (viz předchozí schéma). Podobně stykač může sepnout mnohem vyšší výkon, potřebný například k napájení motoru. A protože většina relé a stykačů má více kontaktů, mohou současně spínat či rozpínat více proudových okruhů.
-
Invertování. Invertování logického řídicího signálu lze docílit pomocí rozpínacího kontaktu – relé s tímto kontaktem tedy působí jako invertor. Příkladem je zapojení signální žárovky, která svítí při vypnutém motoru (viz předchozí schéma).
-
Blokování. Má-li být logický stav dvou relé opačný, tedy má-li být blokován stav současného přitažení dvou relé, je třeba aplikovat zapojení logické funkce nonekvivalence (XOR).
-
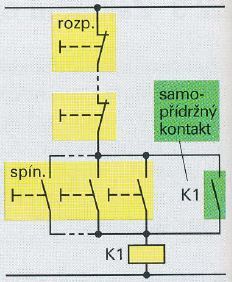
Uchování stavu (paměť). Stav může být uchován pomocí samopřídržného kontaktu, který je u relé realizován pomocí vlastního spínacího kontaktu v napájecím obvodu – je-li stisknuto tlačítko, relé přitáhne a sepne napájecí větev paralelní k tlačítku, která napájí cívku relé i po uvolnění tlačítka.
-
Ovládání více tlačítky. Má-li být přístroj zapínatelný nebo vypínatelný z více různých míst (ovládacích panelů), je třeba zapojit všechna spínací tlačítka paralelně a všechna rozpínací tlačítka sériově.
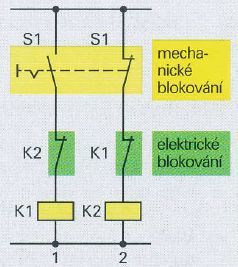
Obr. 3: Vzájemné blokování
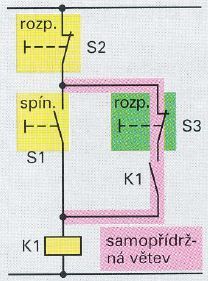
Obr. 4: Uchování stavu
Obr. 5: Ovládání více tlačítky
Znalost těchto základních schémat a kontaktních realizací booleovských funkcí nám nyní dovoluje seznámit se s příklady složitějších ovládacích obvodů.
Ovládání motoru dvěma tlačítky (Start a Stop)
Sepnutím spínacího tlačítka S2 (Start) se uzavře obvod a cívkou stykače K1 začne protékat proud. Po sepnutí stykače K1 se spojí kontakt K1.1 a proud může protékat i po uvolnění tlačítka S2 (viz samopřídržný kontakt). Stisknutím rozpínacího tlačítka S1 (Stop) se obvod vypne.
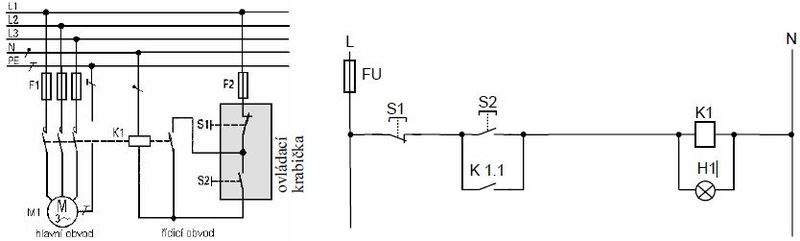
Obr. 6: Celkové schéma zapojení a řádkové schéma řídicího obvodu
Ovládání motoru tlačítky ze dvou míst (2x Start a 2x Stop)
V tomto typu ovládacích obvodů – počet ovládacích míst lze totiž libovolně rozšířit – se spínací tlačítka spojují paralelně a rozpínací sériově (viz ovládání více tlačítky).
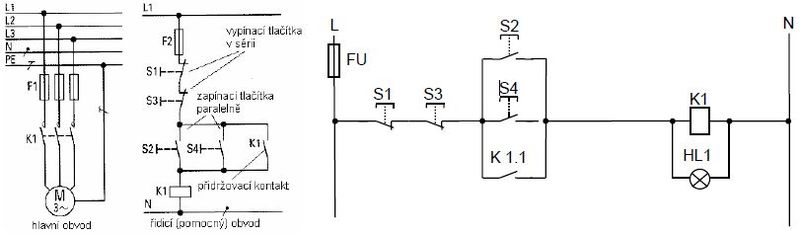
Obr. 7: Celkové schéma zapojení a řádkové schéma řídicího obvodu
Ovládání asynchronního motoru pro oba směry otáčení
Změna směru otáčení (reverzace) trojfázového asynchronního motoru se provede záměnou dvou fází napájejících motor. Proto jsou v zapojení dva stykače, přičemž stykač K2 zaměňuje fázi L1 a L3. Oba stykače ale nesmějí sepnout současně (viz vzájemné blokování), neboť by nastal zkrat. Blokování provádí rozpínací kontakty K1.2 a K2.2. Je-li sepnut stykač K1, kontakt K1.2 je rozpojen, a proto stykač K2 nelze sepnout, a obráceně.
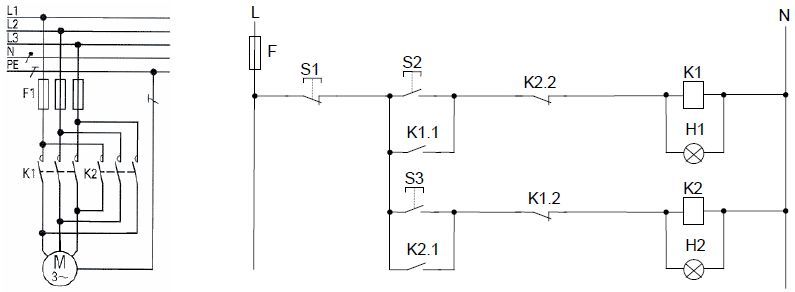
Obr. 8: Celkové schéma zapojení a řádkové schéma řídicího obvodu
Ovládání navazujících dopravníkových pásů
Ovládací obvod musí zajistit, že pokud dojde k zastavení jednoho z pásů, musí se zastavit i pásy předcházející. Proto se zde uplatní realizace logické funkce AND.
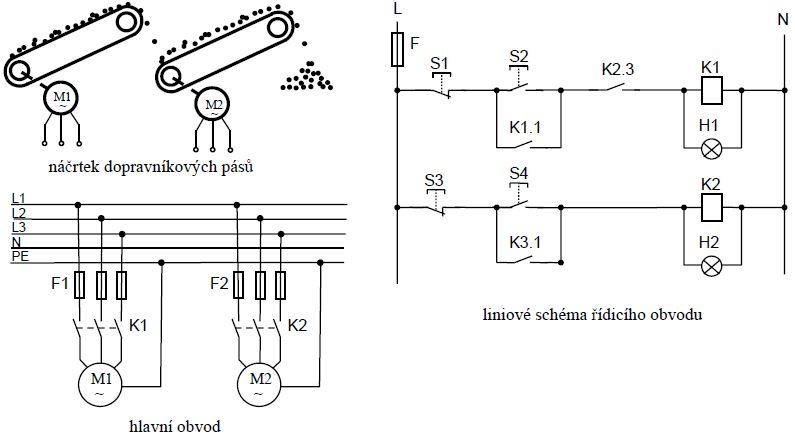
Obr. 9: Celkové schéma zapojení a řádkové schéma řídicího obvodu
Bezkontaktní logické řízení
Ovládací obvod plynového kotle
Řídicí obvod automatického vytápění rodinného domku má otevírat přívod plynu do kotle, když venkovní teplota klesne pod 15° nebo když je sepnut ruční spínač, přičemž voda v kotli musí být nad minimální hladinou a současně musí hořet zapalovací hořáček. Obvod bude realizován bezkontaktně logickými členy NAND.
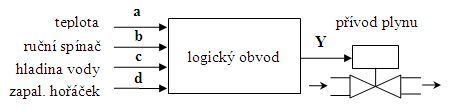
Obr. 10: Realizovaný systém.
Logický obvod tedy zpracovává čtyři vstupní logické proměnné: a (venkovní teplota), která nabývá hodnoty logické 1, pokud teplota klesne pod 15°, dále b (ruční spínač), který získá hodnotu logické 1, je-li sepnut, potom c (hladina vody), která má hodnotu logické 1, je-li nad minimální hladinou a konečně d (zapalovací hořáček), který nabývá hodnoty logické 1, pokud hoří.
Výstupní logická funkce Y pak reprezentuje řízení přívodu plynu do kotle, a tedy bude-li mít hodnotu logické 1, plyn bude otevřen.
Model chování ovládacího obvodu, a tedy i logický výraz lze snadno odvodit ze vstupních podmínek. Následně lze zapsat minimální tvar logické funkce pomocí booleovských operací AND, OR, NOT a dále ji použitím zákona dvojí negace a deMorganova zákona vyjádřit pomocí operací NAND, které jsou modelem bezkontaktní realizace:

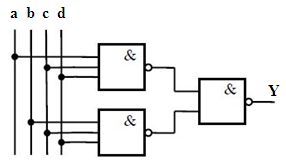
Obr. 11: Schéma logických členů NAND
Ovládání současného běhu více elektromotorů
Ze čtyř elektromotorů mohou z důvodu energetické náročnosti pouze dva běžet současně. Oranžová signálka se rozsvítí, když běží nejvýše dva elektromotory, červená signálka, doplněná akustickým alarmem, svítí a houká, když běží tři nebo čtyři elektromotory. Ovládací obvod, realizovaný booleovskými funkcemi AND, OR a NOT, ukazuje možnost spojení několika logických obvodů do jednoho celku.
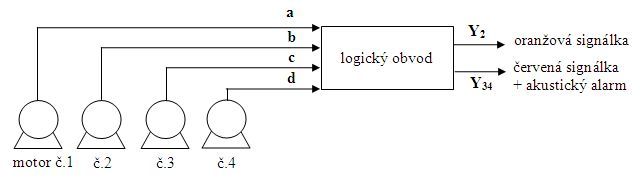
Obr. 12: Realizovaný systém
Proměnné a, b, c, d udávají, zda příslušný motor běží (pak nabývají hodnoty logické 1). Funkce Y2 reprezentuje současný běh nejvýše dvou motorů a udává tedy, má-li svítit oranžová signálka. Funkce Y34 představuje současný běh tří nebo čtyř motorů a udává, zda svítí červená signálka a současně houká alarm.
Minimalizace logických funkcí vede na následující logické výrazy a příslušné blokové schéma:

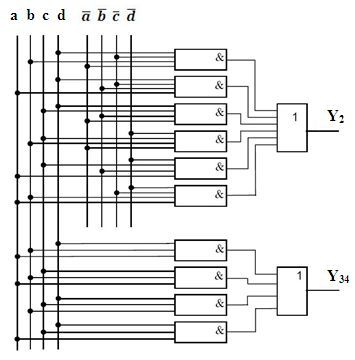
Obr. 13: Schéma bezkontaktní realizace
- TŮMA, Jan a kol. Základy automatizace [on line]. [cit. 2014-8-23]. Dostupný na www: www.elearn.vsb.cz/archivcd/FS/Zaut/Skripta_text.pdf
Obrázky
- Obr. 1, 2, 3, 4, 5: SCHMID, Dietmar a kol. Řízení a regulace pro strojírenství a mechatroniku. Praha: Europa Sobotáles, 2005, 420 s. ISBN 80-86706-1.
- Obr. 6, 7, 8, 9: KOLÁŘ, Václav. Logické řízení [on line]. [cit. 2014-8-23]. Dostupný na www: fei1.vsb.cz/kat420/vyuka/hgf/rozvody_lomy/05_logicke_rizeni.pdf
- Obr. 10, 11, 12, 13: Archiv autora.
- Jakými spínacími přístroji může být elektrický binární signál zesílen, zmnožen a invertován?
- Jakým zapojením kontaktů je možné realizovat funkce logického součinu a logického součtu?
- Jakým kontaktem lze invertovat binární logický signál?
- Vysvětlete, co je vzájemné blokování.
- Jak lze uchovat stav kontaktů?
- Jak je možné podmínit zapnutí přístroje nějakou podmínkou?