Laplaceova transformace
V teorii automatického řízení je Laplaceova transformace účinným nástrojem při popisu chování spojitých lineárních obvodů. Usnadňuje řešení lineárních diferenciálních rovnic.
Laplaceova transformace převádí funkce reálné proměnné t (časové funkce) na funkce komplexní proměnné tzv. operátoru s=α+jω (používá se i označení p). Časovou funkci označujeme jako originál, transformací získáme obraz. Umožňuje převést diferenciální rovnici n-tého řádu na algebraickou n-tého stupně a vytvoření obrazového přenosu jako jednoho ze způsobů vyjádření dynamických vlastností.
Transformace časové funkce f(t) na funkci komplexní proměnné F(s)se provádí pomocí definičního integrálu Laplaceovy transformace:

kde f(t) je originál a F(s) je obraz.
Příklad 1.
Vypočítejte Laplaceův obraz jednotkového skoku 1(t).
Jednotkový skok je definován
Obr. 1: Jednotkový skok

Příklad 2.
Vypočítejte Laplaceův obraz exponenciální funkce . 

V praxi využijeme pro získání obrazu funkce slovník Laplaceovy transformace, ve kterém najdeme obrazy často se vyskytujících funkcí.
Ve slovníku zjistíme, že derivování se převádí na násobení operátorem s:
originál obraz

Postup při použití Laplaceovy transfomace:
Diferenciální rovnici (originál) převedeme pomocí slovníku na obraz, úlohu řešíme v obraze a pokud je to vyžadováno, tak výsledek převedeme zpětnou Laplaceovou transformací L-1 do originálu, opět s využitím slovníku.
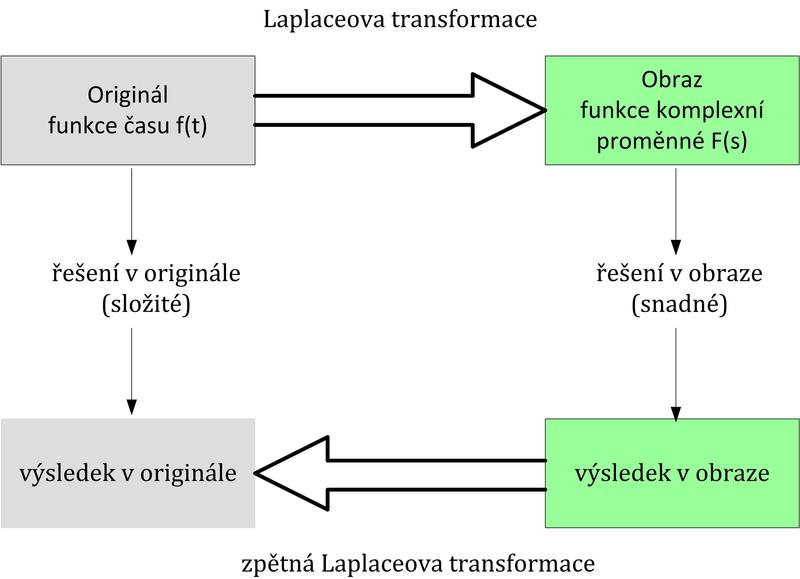
Obr. 2: Postup při použití Laplaceovy transformace
- BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1. vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Obrázky
- Obr. 1: Archiv autora
- Obr. 2: Archiv autora
- Obr. 3: Autor neznámý. Pierre Laplace [online]. [cit. 2015-01-20]. Dostupný na www: http://www.techmania.cz/edutorium/art_vedci.php?key=351.