Popis dynamických vlastností
Dynamické vlastnosti členů regulačních obvodů můžeme popsat pomocí
- diferenciální rovnice
- obrazového přenosu
- přechodové funkce a přechodové charakteristiky
- frekvenčního přenosu a frekvenční charakteristiky.
Diferenciální rovnice
Diferenciální rovnice je základním vyjádřením dynamických vlastností. Vlastnosti spojitých lineárních členů s jednou vstupní a výstupní veličinou popisují lineární diferenciální rovnice s konstantními koeficienty.
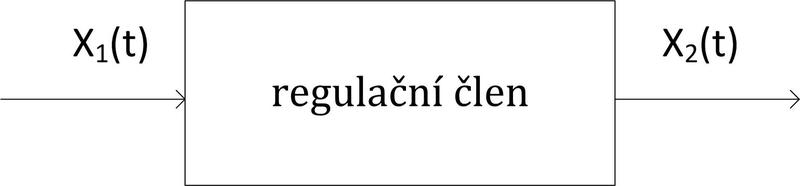
Obr. 1: Člen regulačního obvodu
Příklad obecného tvaru diferenciální rovnice 1. řádu:

kde ai, bi jsou konstanty, x1(t) je vstupní veličina, x2(t) je výstupní veličina, x‘2(t) je derivace výstupní veličiny.
Řešení diferenciálních rovnic je náročné, proto se většinou využívá Laplaceovy transformace, kterou rovnici převedeme na algebraickou.
Obrazový přenos
Přenos členu charakterizuje jeho přenosové vlastnosti. Pokud potřebujeme znát časový průběh výstupního signálu, tak přenosem členu vynásobíme funkci, která vyjadřuje průběh vstupního signálu. Nejčastěji pracujeme s obrazy funkcí, a proto definujeme obrazový přenos jako poměr obrazů výstupního a vstupního signálu:

Tento poměr lze vyjádřit z obrazu diferenciální rovnice. Pro výše uvedenou rovnici platí:

Příklad:
Výpočet obrazového přenosu členu popsaného diferenciální rovnicí:

Rovnici převedeme do obrazu:


a vyjádříme přenos:
Přechodová funkce a přechodová charakteristika
Přechodová funkce je odezva na jednotkový skok, získáme ji řešením diferenciální rovnice při nulových počátečních podmínkách (provedeme zpětnou Laplaceovu transformaci obrazového přenosu vynásobeného obrazem jednotkového skoku). Přechodová charakteristika je jejím grafickým znázorněním.
Přechodová charakteristika je závislost výstupní veličiny na čase, je-li na vstupu jednotkový skok.
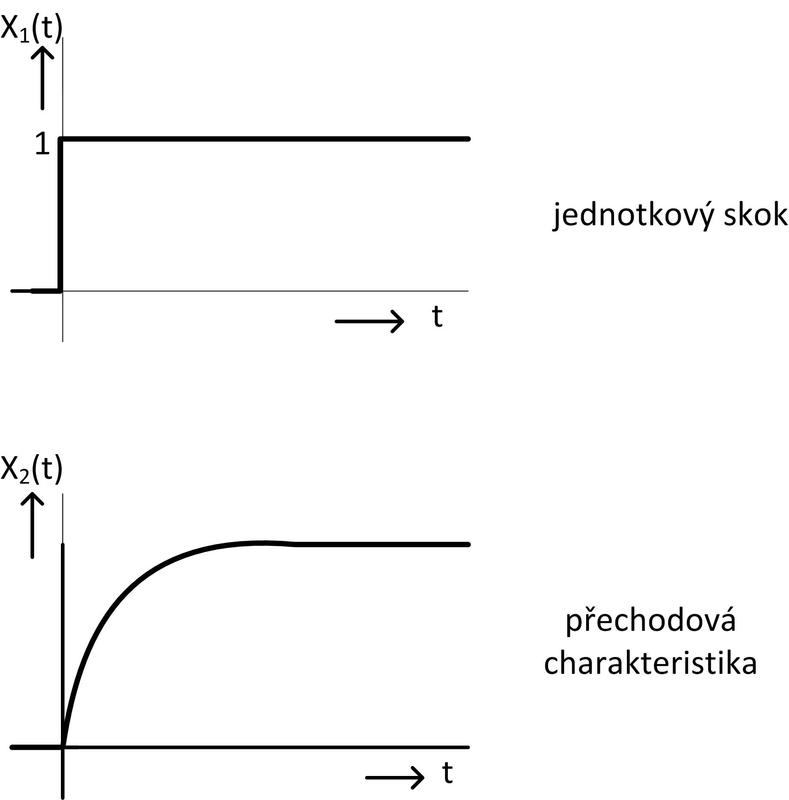
Obr. 2: Příklad průběhu přechodové charakteristiky
Přechodovou charakteristiku můžeme získat také měřením. Na vstup členu připojíme jednotkový skokový signál a v pravidelných intervalech čteme na měřicích přístrojích velikost výstupního signálu. Přechodová charakteristika ukazuje dynamické vlastnosti členu velmi názorně.
Frekvenční přenos a frekvenční charakteristika
Přivedeme-li na vstup členu harmonický signál s určitou amplitudou a úhlovou frekvencí ω, bude výstupní signál také harmonický, ale s jinou amplitudou a určitým fázovým posunem. Harmonické signály x1(t) a x2(t) můžeme vyjádřit pomocí fázorů (komplexních čísel) x1(j ω) a x2(jω), takže frekvenční přenos definujeme jako poměr těchto fázorů:
Pokud známe obrazový přenos členu, tak frekvenční přenos získáme dosazením s=jω.
Příklad:
Pro člen s obrazovým přenosem
má frekvenční přenos tvar
Frekvenční charakteristika je grafickým znázorněním frekvenčního přenosu pro zvolené frekvence v rozsahu od nuly do nekonečna. Může být zakreslena v komplexní rovině nebo logaritmických souřadnicích.
Frekvenční charakteristika v komplexní rovině je čára spojující konce fázorů přenosu pro zvolené frekvence. Amplitudu přenosu vyjadřuje délka fázoru, fáze je vyjádřena úhlem mezi fázorem a kladnou částí reálné osy.
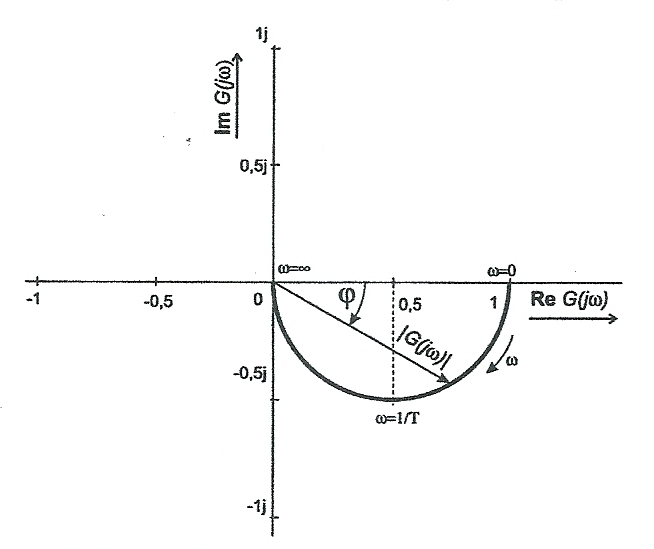
Obr. 3: Frekvenční charakteristiky v komplexní rovině
Frekvenční charakteristiku v logaritmických souřadnicích zakreslujeme jako amplitudovou charakteristiku (závislost amplitudy přenosu na frekvenci) a fázovou charakteristiku (závislost fáze přenosu na frekvenci). Úhlová frekvence je vynesena v logaritmickém měřítku ve frekvenčních dekádách ( úseky, jejichž krajní úhlové frekvence jsou v poměru 10:1). V amplitudové charakteristice vynášíme na svislou osu v lineárním měřítku absolutní hodnotu přenosu v decibelech:

Ve fázové charakteristice vynášíme na svislou osu v lineárním měřítku fázi, nejčastěji ve stupních.
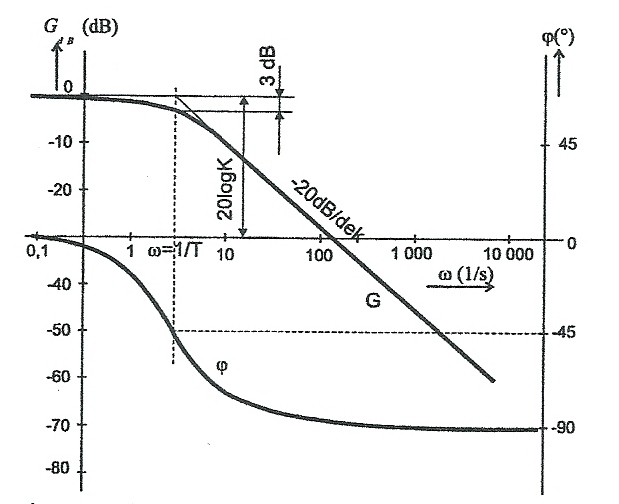
Obr. 4: Frekvenční charakteristika setrvačného členu v logaritmických souřadnicích
Podle dynamických vlastností rozlišujeme základní typové členy statické, integrační a derivační.
-
BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1. vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Obrázky
-
Obr. 1 a 2: Archiv autora
-
Obr. 3 a 4: VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1. vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Jakými způsoby můžeme popsat dynamické vlastnosti členů regulačních obvodů?
Jak je definován obrazový přenos?
Co je přechodová charakteristika?
Jakými způsoby může být zakreslena frekvenční charakteristika?
Vypočítejte obrazový přenos členu s diferenciální rovnicí.