Derivační členy
Výstupní signál x2(t) je úměrný derivaci vstupního signálu x1(t), tedy velikost výstupního signálu je přímo úměrná rychlosti, kterou se mění vstupní signál.
Ideální derivační člen
Ideální derivační člen nevykazuje setrvačnost.
Diferenciální rovnice:
Po úpravě

kde

je derivační časová konstanta.
Z obrazu rovnice v transformaci

vyjádříme obrazový přenos:

Frekvenční přenos je

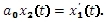
Přechodová charakteristika má tvar Diracova impulzu zvětšeného Td krát:
Obr. 1: Přechodová charakteristika ideálního derivačního členu
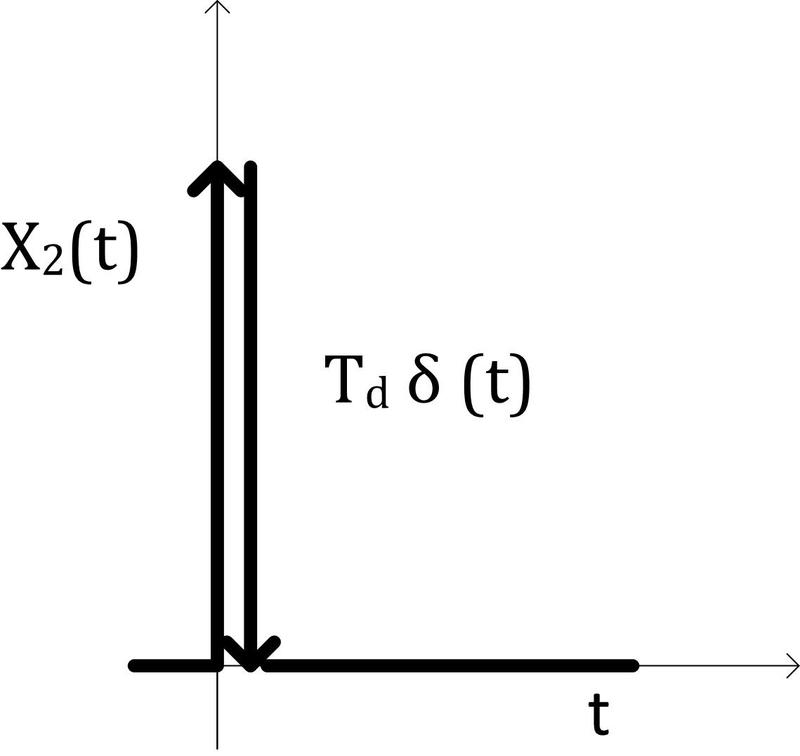
Frekvenční přenos je ryze imaginární a amplituda roste s frekvencí, proto frekvenční charakteristika splývá s kladnou částí imaginární osy:
Obr. 2: Frekvenční charakteristika ideálního derivačního členu
Ideální derivační člen nelze realizovat. Skutečný derivační člen je vždy zatížen setrvačností. Je tvořen sériovým spojením ideálního derivačního členu a setrvačného členu s časovou konstantou T.
Derivační člen se setrvačností 1. řádu
Diferenciální rovnice:

Obrazový přenos:

A frekvenční přenos:
Přechodová a frekvenční charakteristika:
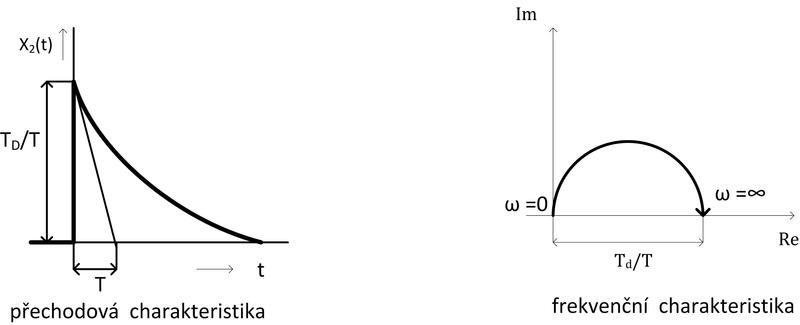
Obr. 3: Charakteristiky derivačního členu se setrvačností
Jako model můžeme použít CR obvod (derivační článek):
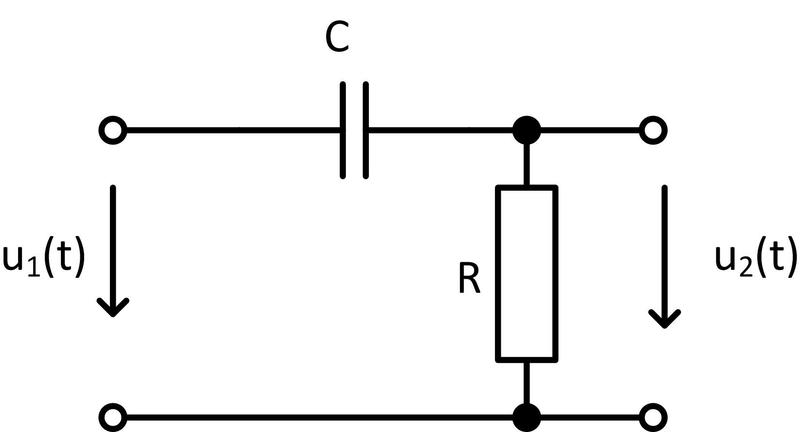
Obr. 4: Model derivačního členu
Příklad: Sestavte diferenciální rovnici nezatíženého derivačního článku.
Podle 2. Kirchhoffova zákona platí:

Pro napětí na kondenzátoru platí:

Pokud je článek nezatížený, neprotéká odbočkou proud a kondenzátorem protéká stejný proud jako rezistorem:

takže napětí na kondenzátoru můžeme vyjádřit jako
Dosadíme do rovnice a rovnici derivujeme:
Po úpravě získáme tvar

který odpovídá diferenciální rovnici derivačního členu se setrvačností 1.řádu, když T=Td=RC .