Integrační členy
Výstupní signál x2(t) je úměrný integrálu vstupního signálu x1(t), takže se stále mění. Rychlost jeho změny je úměrná velikosti vstupního signálu.
Ideální integrační člen
Nemá setrvačné zpoždění.
Diferenciální rovnice je 1. řádu a neobsahuje prostý člen (koeficient a0 =0):
po úpravě:

kde  je rychlostní konstanta, a1=Ti je integrační konstanta.
je rychlostní konstanta, a1=Ti je integrační konstanta.
Rovnice může být také zapsána ve tvaru:
Obraz rovnice v transformaci:
a obrazový přenos:

Frekvenční přenos má tvar:
Přechodová charakteristika je přímka se směrnicí kv :
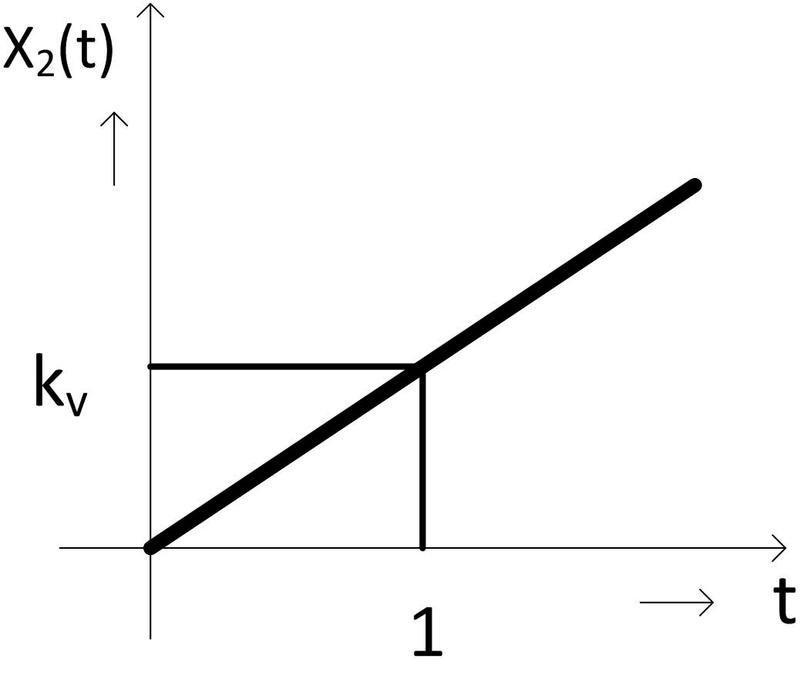
Obr. 1: Přechodová charakteristika ideálního integračního členu
Frekvenční charakteristika leží v záporné imaginární ose, amplituda přenosu klesá s rostoucí frekvencí:
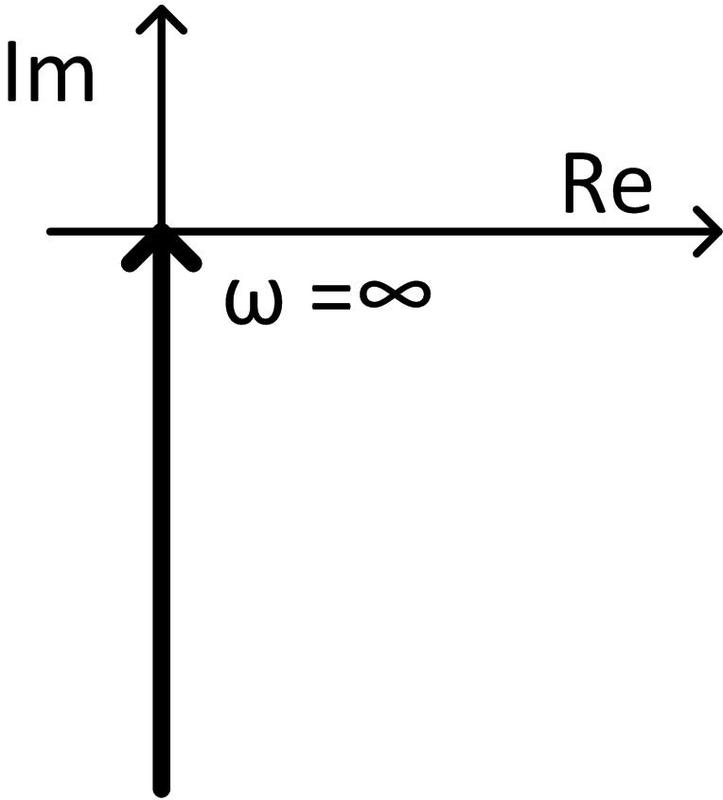
Obr. 2: Frekvenční charakteristika ideálního integračního členu
Ideální integrační člen lze realizovat například operačním zesilovačem s vhodnou zpětnou vazbou (viz lekce Jednoduché regulátory). V určité oblasti může být integrační člen nahrazen setrvačným členem, pokud platí RCω≫1.
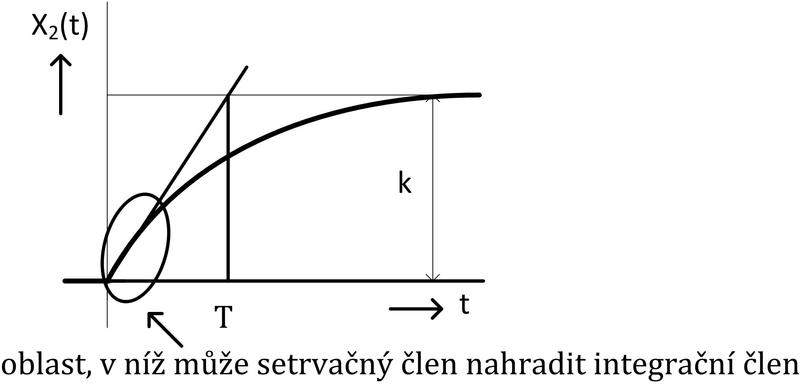
Obr. 3: Setrvačný člen jako náhrada integračního členu
Úloha:
Vypočítejte přechodovou funkci ideálního integračního členu.
Přechodovou funkci získáme zpětnou Laplaceovou transformací obrazového přenosu vynásobeného obrazem jednotkového skoku. Obraz jednotkového skoku najdeme ve slovníku Laplaceovy transformace[2].

Ve slovníku vyhledáme k obrazu originál, což je lineární funkce f(t)= t.
Přechodová funkce má tedy tvar:

Integrační člen se setrvačností 1. řádu
Je složen z ideálního integračního členu a setrvačného členu v sériovém zapojení.
Diferenciální rovnice má tvar:

Obrazový přenos:
a frekvenční přenos:
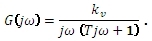
Přechodová a frekvenční charakteristika:
Obr. 4: Charakteristiky integračního členu se setrvačností 1. řádu
-
BALÁTĚ, Jaroslav. Automatické řízení. 2. přepracované vyd. Praha: BEN – technická literatura, 2004, 664s. ISBN 80-7300-148-9.
-
VORÁČEK, Rudolf, František ANDRÝSEK, Zdeněk BRÝDL, Luděk KOHOUT a Ladislav ŠMEJKAL. Automatizace a automatizační technika II. 1.vyd. Praha: Computer Press, 2000, 218s. ISBN 80-7226-247-5.
Obrázky
-
Obr. 1, 2 a 3: Archiv autora